















 4 / 9
4 / 9

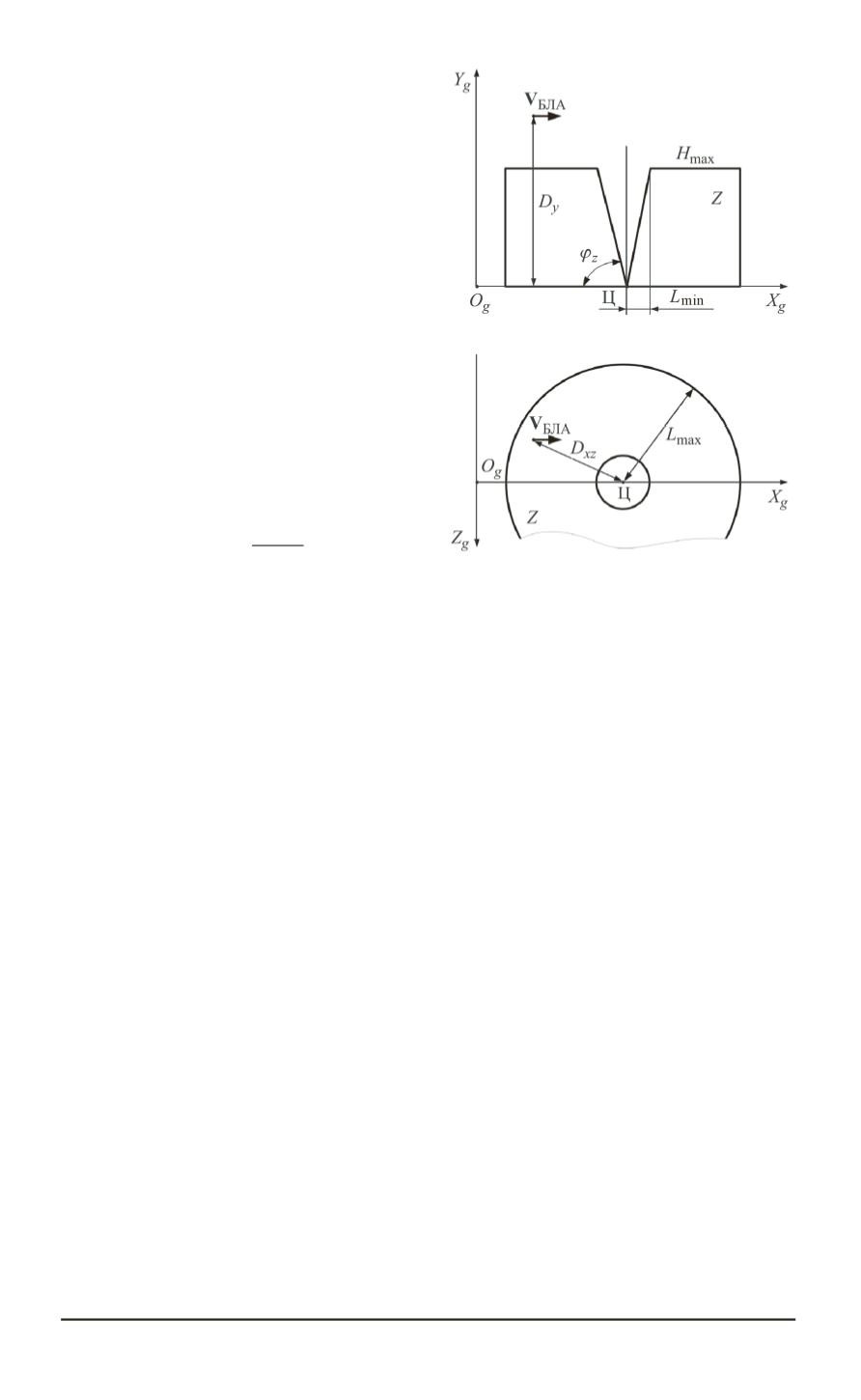
Рис. 1. Математическая модель ПВО:
Ц — цель (ЗРК);
V
БЛА
— вектор скорости
БЛА;
О
g
— центр НЗСК
О
g
X
g
Y
g
Z
g
к цели на предельно малых вы-
сотах, где зона поражения имеет
“мертвую зону”, не рассматривает-
ся. Подобные задачи для крылатых
ракет давно известны и имеют ре-
шение [4, 5].
Время нахождения в зоне пора-
жения
Z
определяется с момента
пересечения ее границ траекторией
БЛА и описывается с помощью си-
стемы неравенств, которая доста-
точно полно отражает математиче-
скую модель ПВО (рис. 1) [6, 7]:
Z
=
D
y
< H
max
;
L
min
< D
xz
< L
max
;
D
y
<
D
xz
tg
ϕ
z
;
L
min
> D
xz
,
где
D
y
— высота полета летатель-
ного аппарата над ЗРК;
H
max
—
максимальная высота зоны поражения;
L
min
,
L
max
— минимальная и
максимальная дальности зоны поражения;
D
xz
— горизонтальная даль-
ность от летательного аппарата до ЗРК;
ϕ
z
— предельный угол зоны
поражения ЗРК. Значения параметров зон поражения ЗРК “Нева-М”
(
z
1
) и “Печора” (
z
2
) приведены ниже [8]:
H
max
, км
L
min
, км
L
max
, км
“Нева-М” С-125М ЗУР В-600П (5В24) . . . . . . . . . . . .
10
6
12
“Печора” ЗУР В-601ПК . . . . . . . . . . . . . . . . . . . . . . . . . .
16
3
14
Для объективной оценки работы АФБТ ЗРК расположены в одной
точке цели.
Алгоритм формирования безопасной траектории.
При создании
АФБТ в качестве прототипа использован метод пропорционального
наведения (МПН). При наведении БЛА класса воздух–земля на не-
подвижную цель по МПН угловая скорость вектора земной скорости
БЛА пропорциональна угловой скорости вращения вектора дальности
БЛА — цель [9]. В ходе разработки АФБТ авторы настоящей статьи
руководствовались критериями качества, которые были описаны при
решении схожей задачи выбора оптимального маршрута для самоле-
та в условиях противодействия системы объектовой ПВО: полагается,
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2015. № 3 17