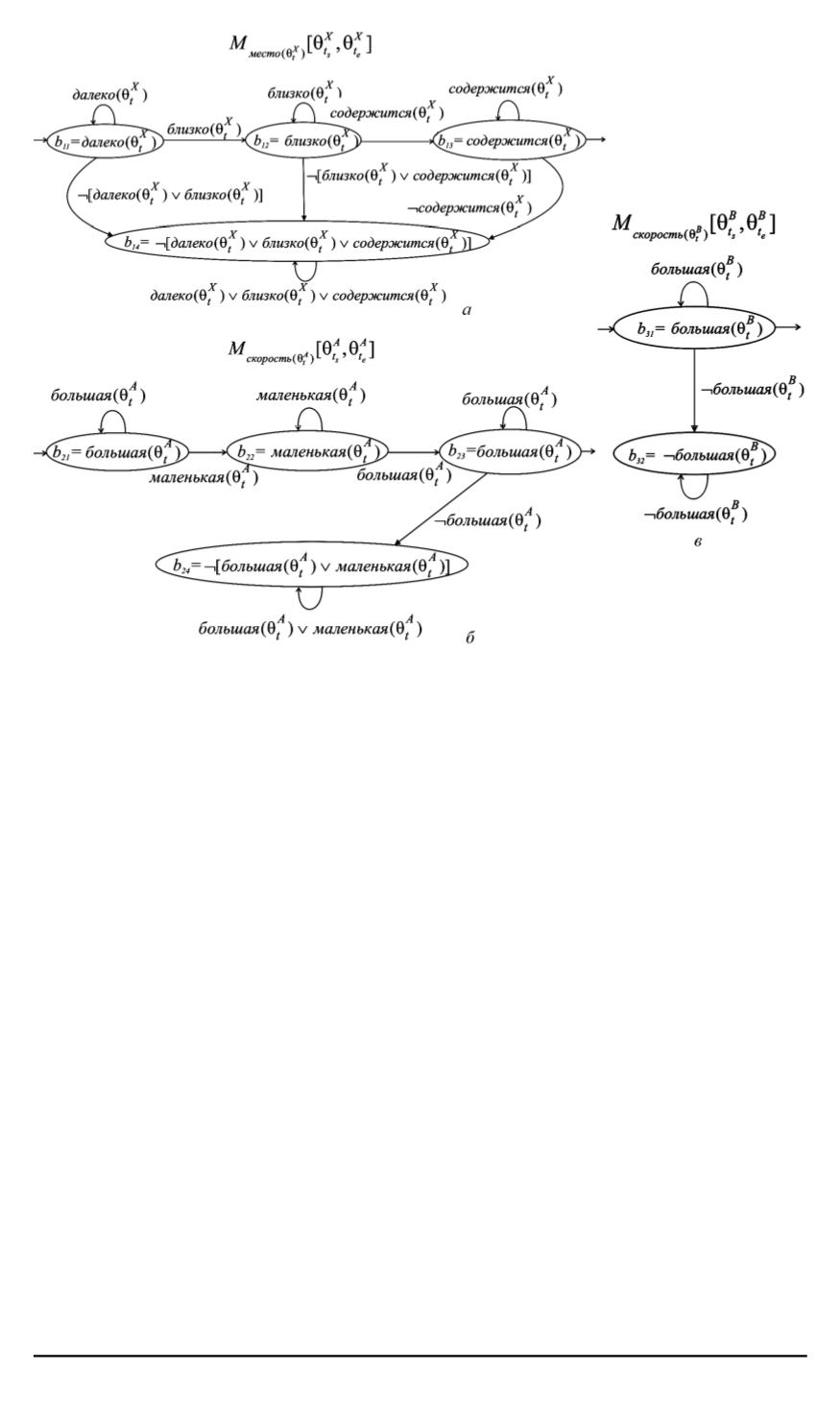
Рис. 3. Граф автомата 1-го уровня:
а
—
M
место
(
θ
X
t
)
[
θ
X
t
s
, θ
X
t
e
]
;
б
—
M
скорость
(
θ
A
t
)
[
θ
A
t
s
, θ
A
t
e
]
;
в
—
M
скорость
(
θ
B
t
)
[
θ
B
t
s
, θ
B
t
e
]
гвистическую переменную
обстановка
(
θ
A
, θ
B
)
, которая принимает
лингвистические значения
безопасная
(
θ
A
, θ
B
)
,
предаварийная
(
θ
A
, θ
B
)
и
аварийная
(
θ
A
, θ
B
)
, заданные следующими отношениями:
безопасная
(
θ
A
, θ
B
) =
=
место
(
θ
A
) =
далеко
(
θ
A
)
∧
место
(
θ
B
) =
далеко
(
θ
B
) ;
(1)
предаварийная
(
θ
A
, θ
B
) =
=
место
(
θ
A
) =
близко
(
θ
A
)
∧
скорость
(
θ
B
) =
большая
(
θ
B
)
∨
∨
скорость
(
θ
A
) =
большая
∧
место
(
θ
B
) =
близко
;
(2)
аварийная
(
θ
A
, θ
B
) =
место
(
θ
A
) =
содержится
(
θ
A
)
∧
∧
место
(
θ
B
) =
содержится
(
θ
B
)
.
(3)
Каждому лингвистическому значению лингвистической перемен-
ной
обстановка
(
θ
A
, θ
B
)
соответствует производное нечеткое множе-
ство, заданное на многомерном универсуме. Универсум производного
32 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2013. № 3


