Модифицируем ряд понятий и обозначений, введенных в рабо-
те [14], применительно к нашей задаче. Введем дискретную шкалу
виртуальных моментов времени
T
=
{
t
|
t
2
N
}
такую, что раз-
ность
Δ
t
=
t
i
+1
−
t
i
между двумя соседними отсчетами време-
ни является константой. Определим на шкале
T
временной интер-
вал
[
t
s
, t
e
] =
{
t
|
t
s
≤
t
≤
t
e
}
. Будем полагать, что каждый при-
знак 0-го уровня (в нашем примере это расстояние и скорость) ка-
ждого движущегося объекта
θ
из некоторого множества объектов
{
θ
1
, θ
2
, . . . , θ
l
}
в момент времени
t
может принимать значение
y
i
0
(
θ
t
)
,
i
0
2 {
1
, . . . , m
0
}
, которое называется
отсчетом
. Кортеж отсчетов
Y
i
0
[
θ
t
s
, θ
t
e
] =
h
y
i
0
(
θ
t
s
)
, . . . , y
i
0
(
θ
t
e
)
i
,
i
0
2 {
1
, . . . , m
0
}
одного признака
0-го уровня в течение нескольких подряд идущих моментов времени
t
s
, . . . , t
e
(в течение временного интервала [
t
s
, t
e
]) называется
трен-
дом
.
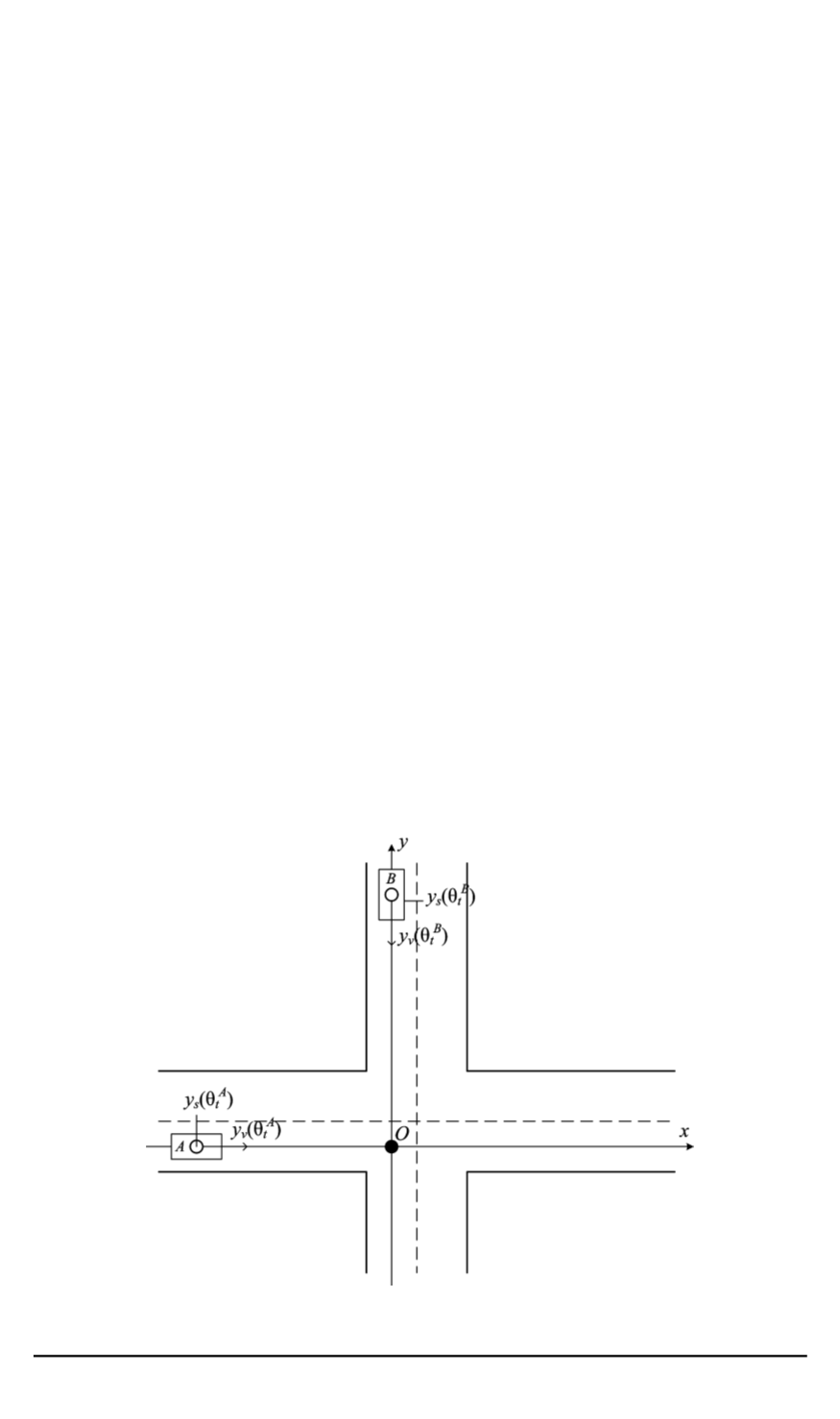
Рассмотрим аварийную ситуацию. Пусть имеется прямоугольный
автодорожный перекресток. Автомобиль
A
двигается по дороге в сто-
рону перекрестка и приостанавливается, немного не доехав до него.
Автомобиль
B
двигается в сторону перекрестка по перпендикулярной
дороге. Когда автомобиль
B
уже подъезжает к перекрестку, автомо-
биль
A
вдруг набирает скорость и сталкивается с автомобилем
B
.
Для задания эталонной ситуации поведения автомобилей прежде
всего требуется выбрать необходимые признаки. Пусть автомобили
A
и
B
выезжают на перекресток, двигаясь по взаимно перпендикуляр-
ным прямым линиям, пересекающимся в точке
O
(рис. 1).
Свяжем с перекрестком прямоугольную декартову систему коор-
динат
xOy
так, чтобы ось
Ox
совпала с линией движения автомобиля
Рис. 1. Движение автомобилей в системе координат, связанной с перекрестком
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2013. № 3 29


