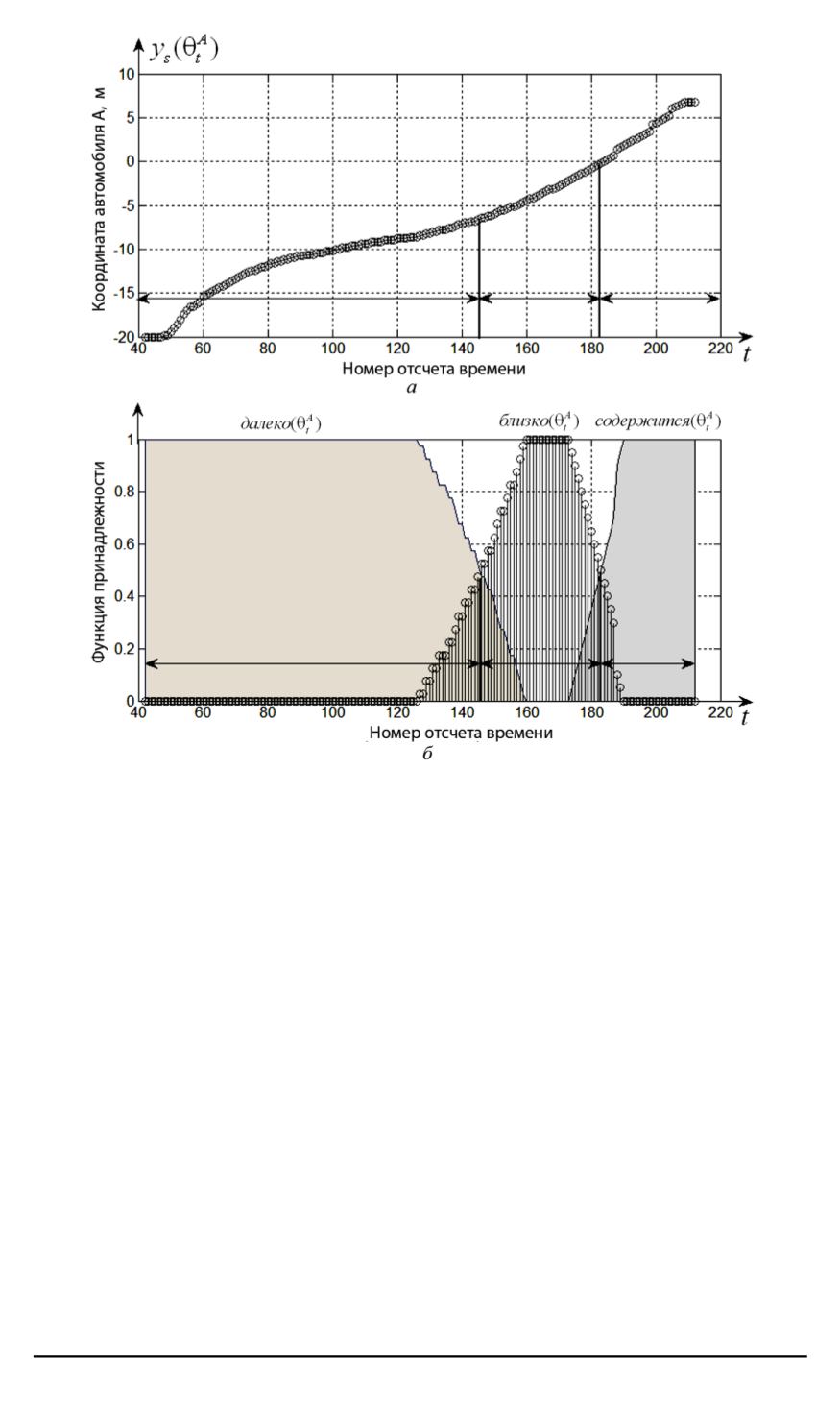
Рис. 7. Результат обработки тренда координаты автомобиля
A
:
а
— исходный тренд;
б
— значения функций принадлежности отсчетов тренда, соот-
ветствующих лингвистическим значениям переменной
место
(
θ
A
t
)
ций принадлежности ведется в соответствии с формулами (1)–(3) по
правилам (4)–(6) с использованием функций принадлежности лин-
гвистических переменных
место
(
θ
A
t
)
,
место
(
θ
B
t
)
,
скорость
(
θ
A
t
)
и
скорость
(
θ
B
t
)
, полученных при построении автоматов 1-го уровня.
Затем интервал времени
[
t
s
, t
e
]
разбивается на промежутки с постоян-
ными значениями лингвистической переменной
обстановка
(
θ
A
t
, θ
B
t
)
.
Последовательность значений лингвистической переменной, соответ-
ствующих полученным промежуткам времени, дает цепочку разре-
шенных состояний автомата
M
обстановка
(
θ
A
t
,θ
B
t
)
[Θ
A,B
t
s
,
Θ
A,B
t
e
]
(см. рис. 4).
3. Распознавание ситуаций на основе эталонных моделей и ре-
зультатов виртуального моделирования.
Рассмотрим процесс рас-
познавания ситуации, заданной эталонной моделью (см. рис. 5), по
трендам признаков (см. рис. 6).
Тренды признаков заданы на интервале времени
t
2
[
t
0
, t
212
]
, t
0
=
= 0
c,
t
212
= 7
,
07
c (шаг дискретизации
Δ
t
= 0
,
03
c). Эталонная мо-
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2013. № 3 37


