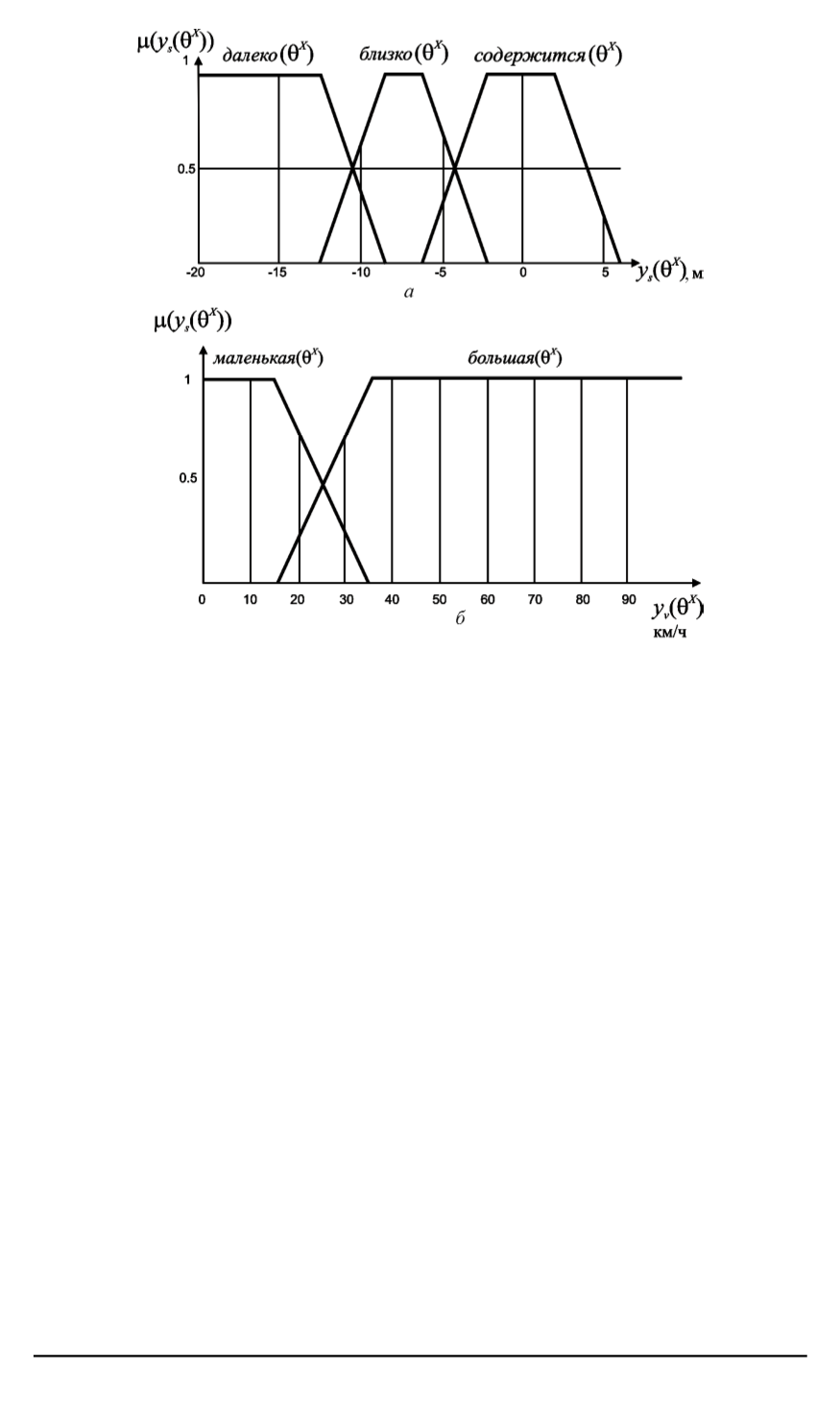
Рис. 2. Нечеткие множества, соответствующие лингвистическим значениям:
а
—
далеко
(
θ
X
)
,
близко
(
θ
X
)
,
содержится
(
θ
X
)
;
б
—
большая
(
θ
X
)
,
маленькая
(
θ
X
)
Состояния автомата
b
11
, b
12
, b
13
соответствуют лингвистическим значе-
ниям
далеко
(
θ
X
)
,
близко
(
θ
X
)
,
содержится
(
θ
X
)
. Здесь
b
11
— начальное
состояние автомата (помечено входящей стрелкой на рис. 3,
a
),
b
13
— конечное состояние автомата (помечено выходящей стрелкой на
рис. 3,
a
). Условия переходов между состояниями автомата задаются
следующим образом. При поступлении на вход автомата лингвисти-
ческого значения, соответствующего текущему состоянию, автомат
остается в этом состоянии. При поступлении на вход автомата лин-
гвистического значения, отличного от того, которому соответствует
данное состояние, автомат переходит в другое состояние, соответству-
ющее этому новому лингвистическому значению. При поступлении
на вход автомата лингвистического значения, не соответствующего ни
одному из лингвистических значений, автомат переходит в запрещен-
ное состояние
b
14
. Однажды попав в запрещенное состояние, автомат
остается в этом состоянии при любых значениях на входе.
Графы автоматов
M
скорость
(
θ
A
t
)
[
θ
A
t
s
, θ
A
t
e
]
и
M
скорость
(
θ
B
t
)
[
θ
B
t
s
, θ
B
t
e
]
пред-
ставлены на рис. 3,
б
и
в
. Графы различны, поскольку в рассматривае-
мой ситуации автомобили ведут себя по-разному.
Для задания опасной ситуации совместного поведения автомоби-
лей построим эталонный автомат 2-го уровня. Для этого введем лин-
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2013. № 3 31


