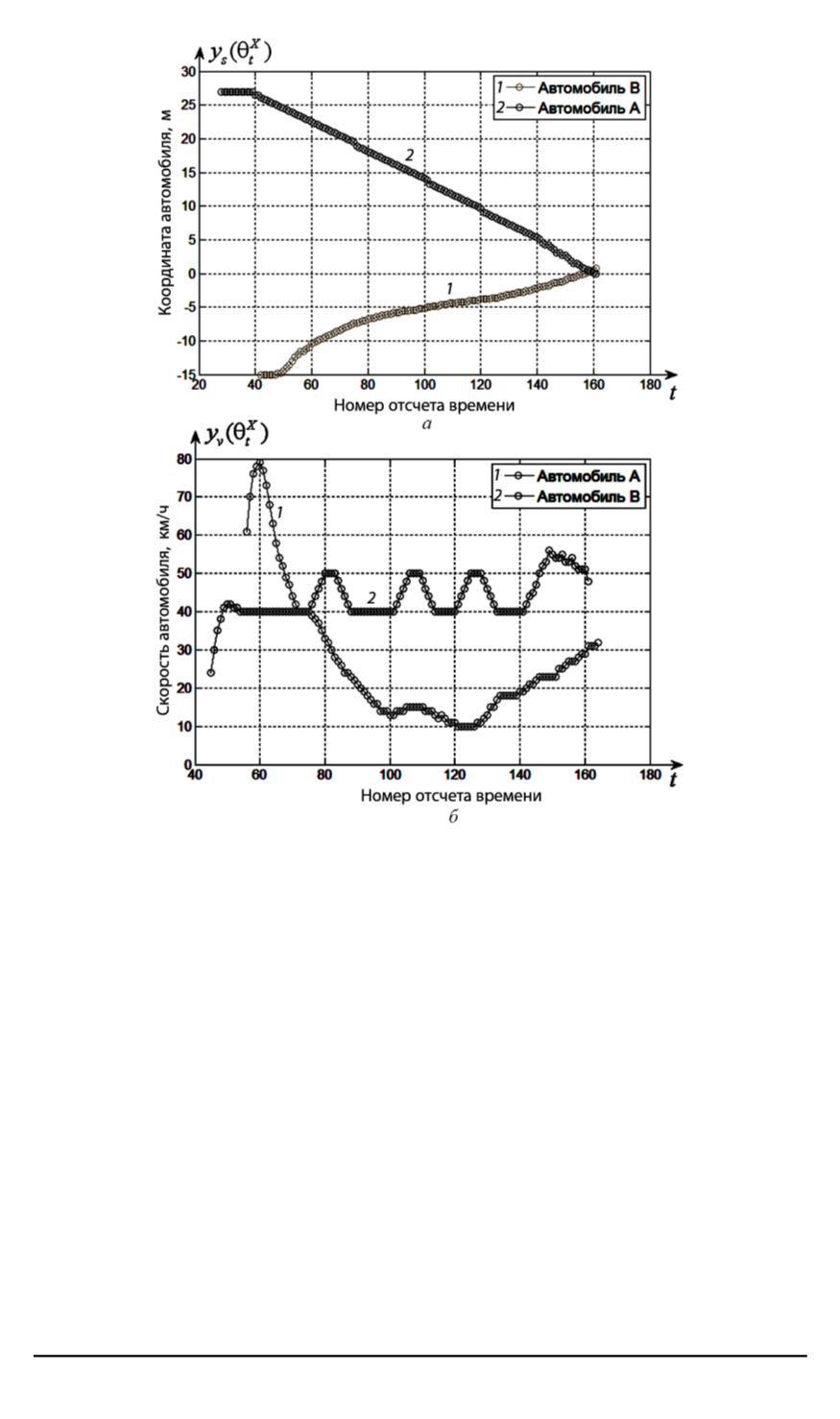
Рис. 6. Тренды координат (
а
) и скоростей (
б
) автомобилей
Эталонный автомат 1-го уровня
M
место
(
θ
A
t
)
[
θ
A
t
s
, θ
A
t
e
]
составляется по
тренду координаты автомобиля
A
(см. рис. 6,
а
). Для каждого отсче-
та тренда определяется лингвистическое значение лингвистической
переменной
место
(
θ
A
t
)
, которое имеет наибольшую функцию принад-
лежности. Затем тренд разбивается на участки с постоянными зна-
чениями лингвистической переменной (рис. 7). Последовательность
значений лингвистической переменной, соответствующих получен-
ным участкам тренда, дает цепочку разрешенных состояний автомата
M
место
(
θ
A
t
)
[
θ
A
t
s
, θ
A
t
e
]
(см. рис. 3,
а
).
Эталонный автомат 2-го уровня
M
место
(
θ
A
t
,θ
B
t
)
[Θ
A,B
t
s
,
Θ
A,B
t
e
]
составля-
ется по результатам обработки трендов всех четырех признаков (см.
рис. 6). Для каждого момента времени
t
2
[
t
s
, t
e
]
определяется лингви-
стическое значение лингвистической переменной
обстановка
(
θ
A
t
, θ
B
t
)
,
которое имеет наибольшую функцию принадлежности. Расчет функ-
36 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2013. № 3


