Рис. 5. Траектории общей СК (в центре) и инструментальных СК левой и пра-
вой рук двурукого МР
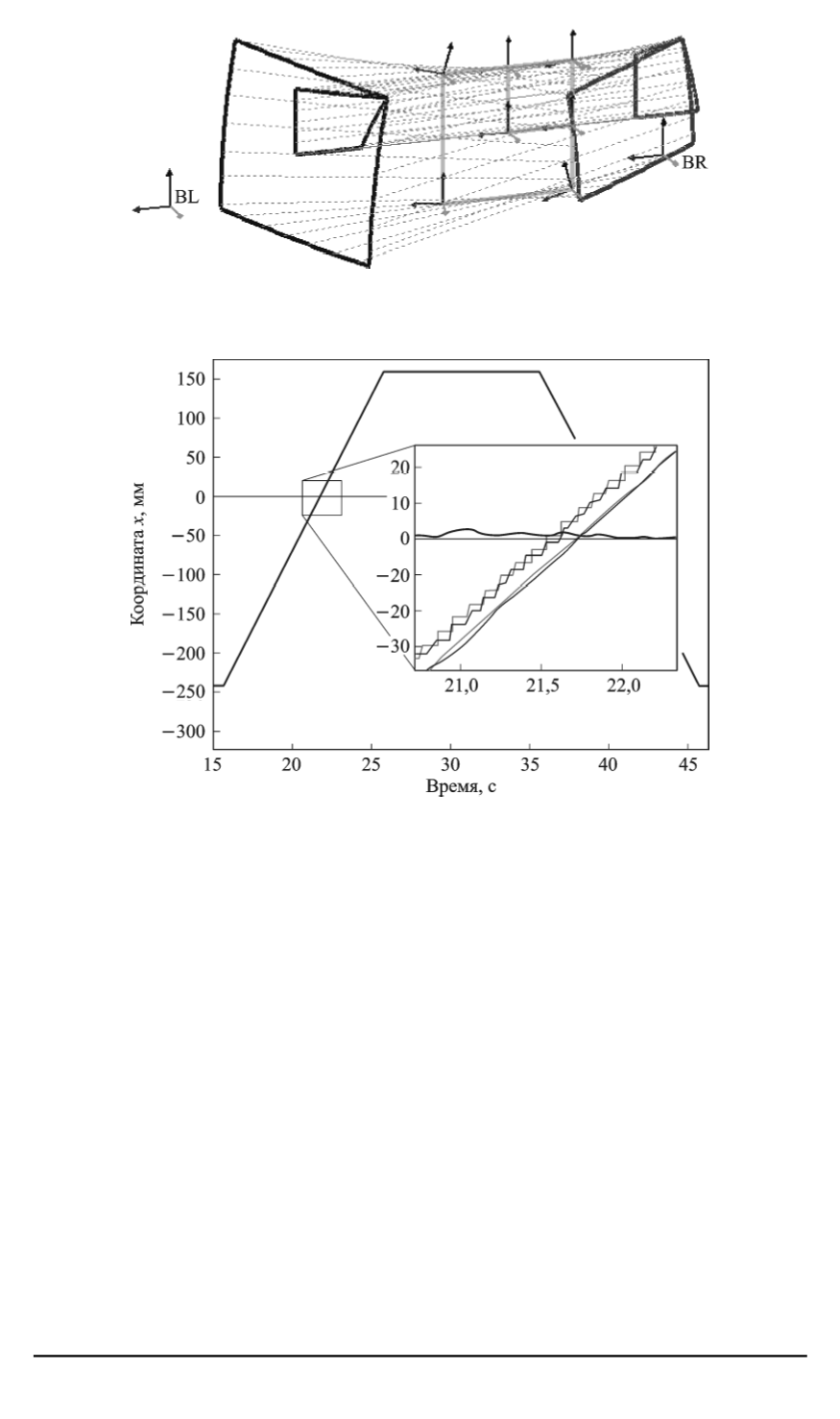
Рис. 6. Заданные (ступенчатые) и реальные траектории движения левой и пра-
вой рук в мировой СК, относительная ошибка при движении в связанном ре-
жиме с виртуальным объектом
руки, а ошибка отработки каждой руки плановой траектории связана
прежде всего с особенностями алгоритма аппроксимации траектории
ТСУ ПР Kawasaki, который вносит постоянную задержку. Отметим,
что имеет место относительная ошибка позиционирования рук, но
она много меньше абсолютной ошибки позиционирования каждой ру-
ки относительно плановой траектории. Эксперимент показал, что при
применении первого алгоритма возможно повышение относительной
точности позиционирования рук по сравнению с абсолютной точно-
стью позиционирования каждой руки отдельно.
Эксперимент 4.
Исследование сил и моментов реакции, возника-
ющих при согласованном движении двух рук.
Руки МР во время экс-
перимента жестко удерживали гибкую металлическую трубку и дви-
гались поперек ее оси. Как и в эксперименте 3, инструментальные
СК рук были сдвинуты таким образом, что совпадали перед началом
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2012. № 4 39


