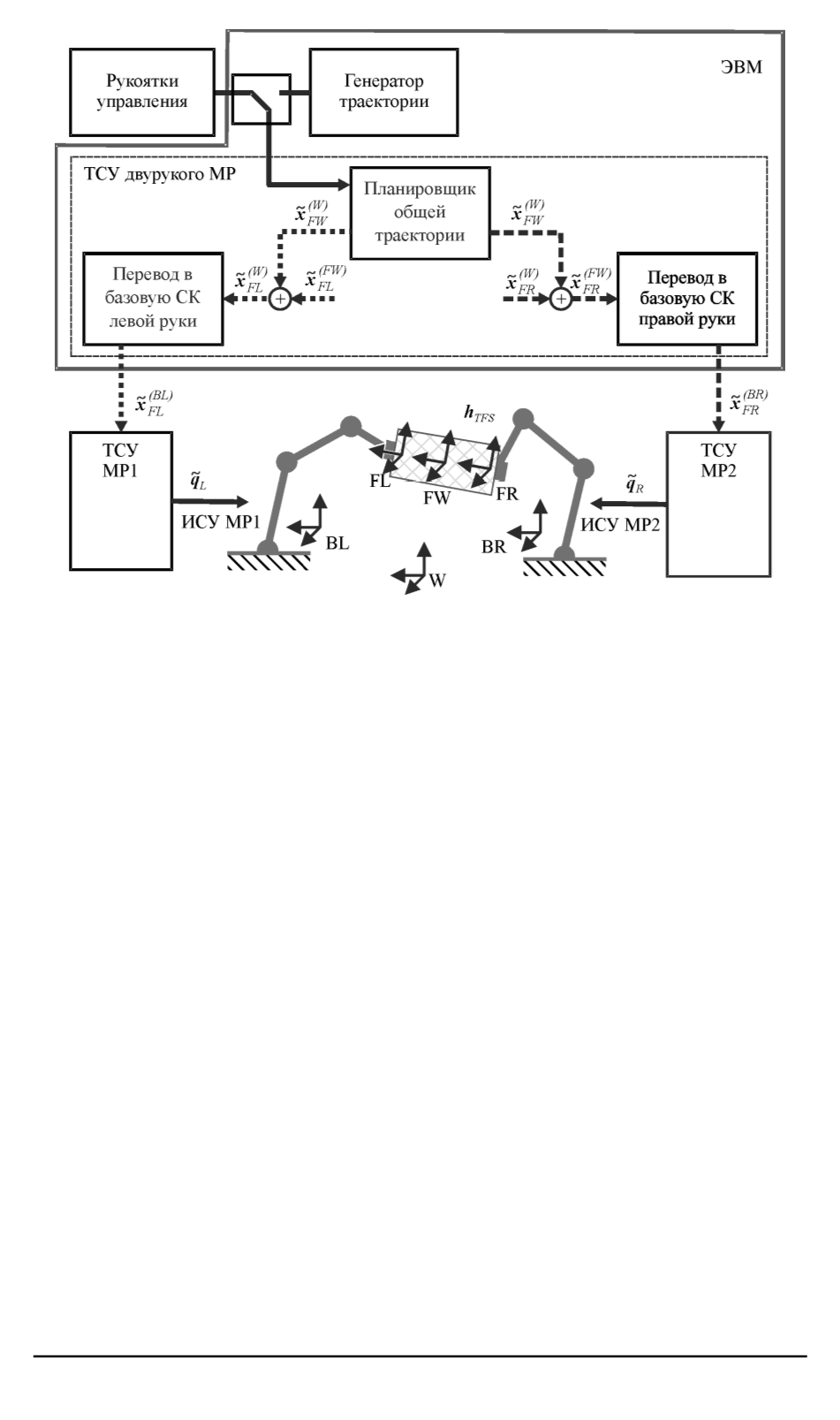
Рис. 1. Структура системы управления двурукого МР
Соотношения для расчета параметров траектории левой руки име-
ют вид
(
τ
FL,BL
=
τ
FL,FW
τ
FW,W
τ
W,BL
;
l
(BL)
FL,BL
=
τ
T
W,BL
τ
T
FW,W
l
(FW)
FW,FL
+
l
(W)
W,FW
+
l
(BL)
BL,W
,
(1)
где
τ
FL,FW
— матрица перехода от общей СК двурукого робота к инстру-
ментальной СК левой руки;
τ
FW,W
— матрица перехода от мировой СК
к рабочей СК двурукого робота (определяется траекторией движения
объекта);
τ
W,BL
— матрица перехода от мировой СК к базовой СК левой
руки;
l
(FW)
FW,FL
— смещение начала координат инструментальной СК ле-
вой руки относительно рабочей СК двурукого МР;
l
(W)
W,FW
— смещение
начала координат рабочей СК двурукого МР относительно мировой
СК (определяется траекторией движения объекта);
l
(BL)
BL,W
— смещение
начала координат базовой СК левой руки относительно мировой СК.
Элементы матриц
τ
FL,FW
,
τ
W,BL
и векторов
l
(FW)
FW,FL
,
l
(BL)
BL,W
— постоянные
величины.
Описанный подход удобно применять при выполнении операций,
в которых не требуется контролировать возникающие в процессе дви-
жения МР силы и моменты реакций, например, при манипулировании
объектами, допускающими деформацию. Этот подход прост в реа-
лизации и не требует использования дополнительного оборудования,
такого как СМД.
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2012. № 4 35


