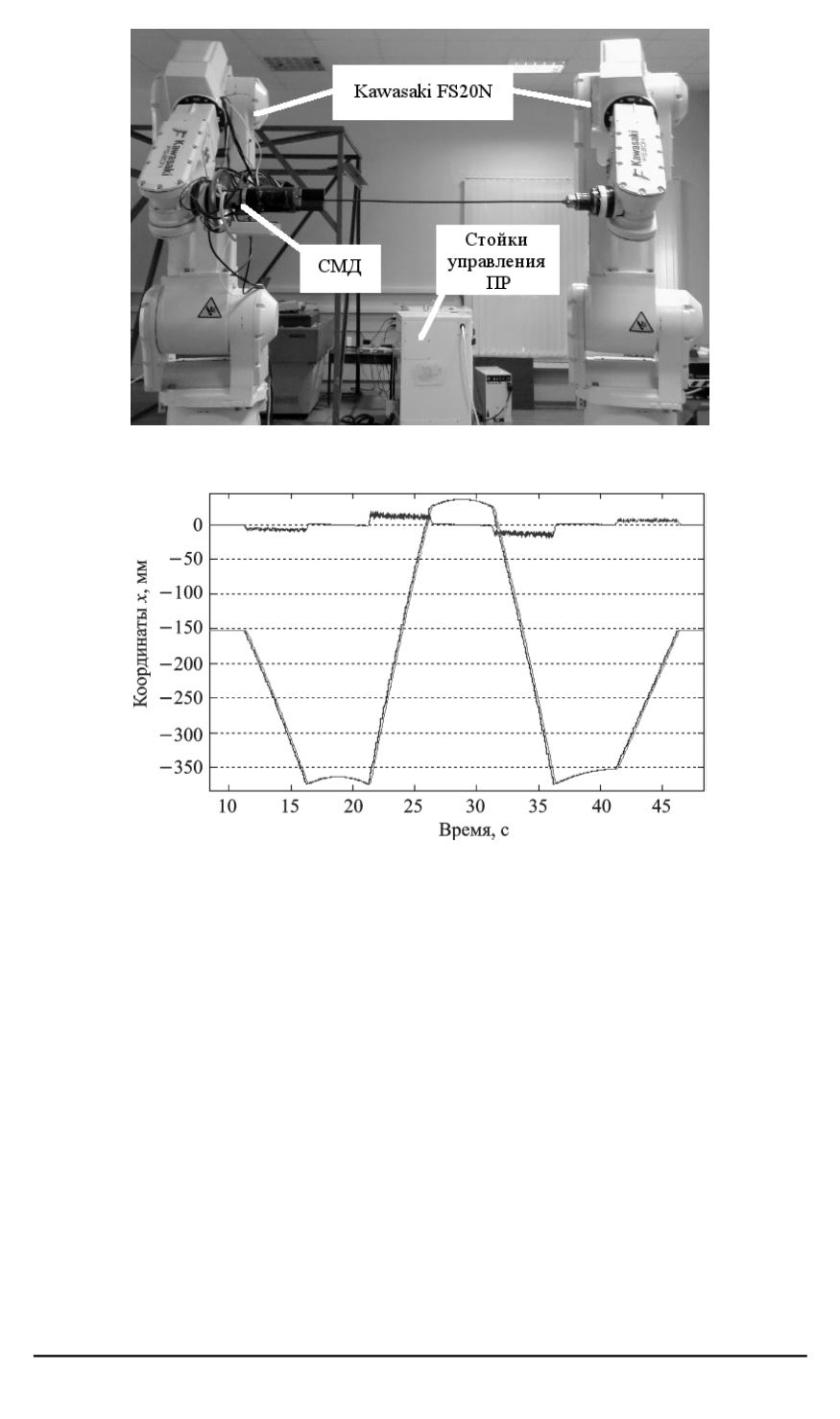
Рис. 3. Экспериментальный стенд “двурукий робот”
Рис. 4. Плановая и реальная (светлее) траектории движения, ошибка (сверху)
при независимом движения ПР в свободном пространстве
времени. Штриховыми линиями связаны точки траекторий, соответ-
ствующие одному и тому же моменту времени.
На рисунке видна разница между траекториями движения МР1
и МР2 в абсолютном пространстве, что естественно в силу свойств
алгоритма.
Эксперимент 3.
Исследование относительной ошибки, возника-
ющей при согласованном движении двух рук.
Как и в эксперименте
2, руки двигались так, как будто они захватили виртуальный объект.
Однако инструментальные СК рук были сдвинуты относительно их
базовых СК таким образом, что совпадали перед началом движения.
Плановые и реальные траектории каждой руки приведены на рис. 6.
Ступенчатый вид плановых траекторий объясняется дискретностью
поступления точек от планировщика общего движения в ТСУ каждой
38 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2012. № 4


