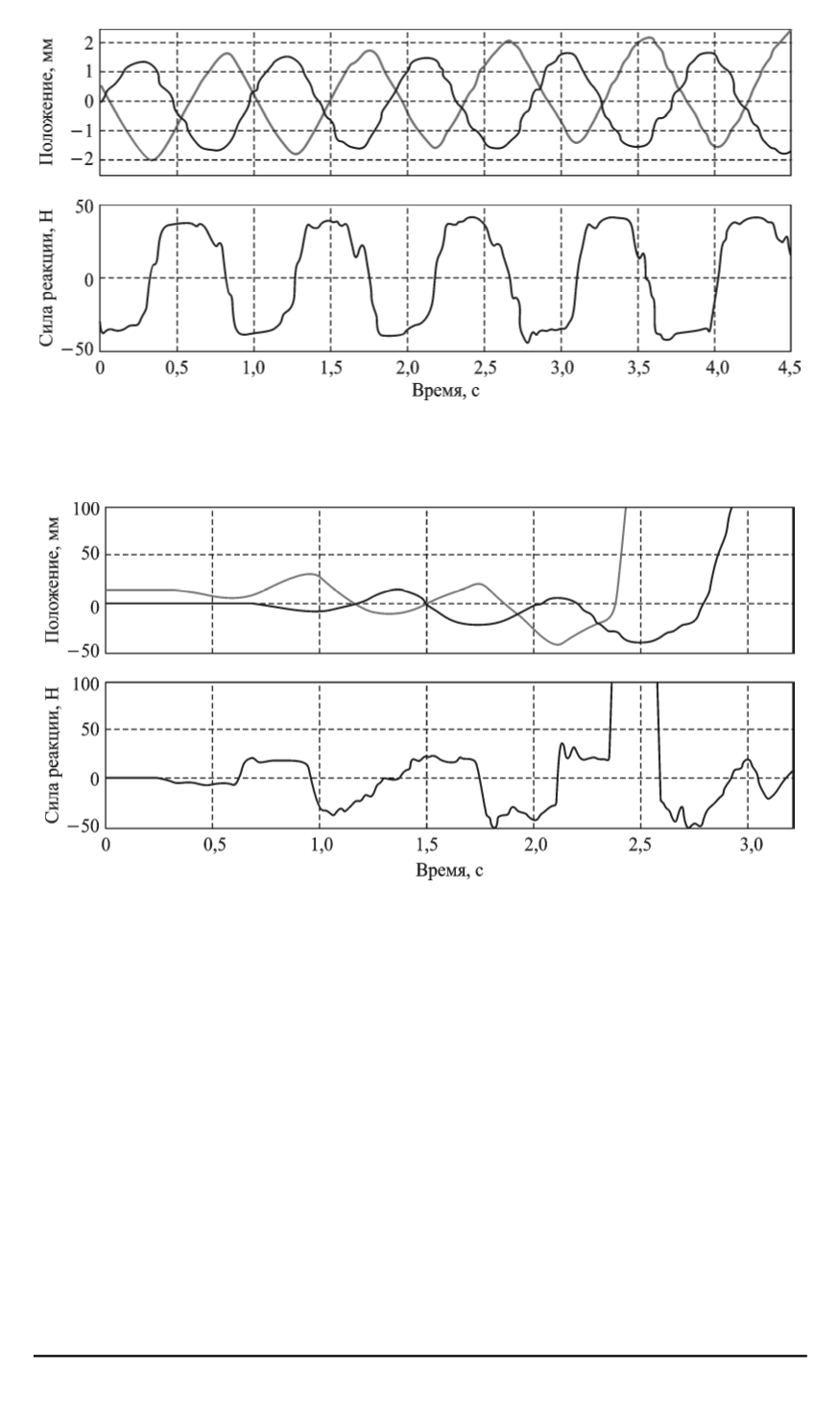
Рис. 9. Автоколебания при управлении по схеме “ведущий-ведомый”. Вверху —
управляющий сигнал (светлее) и реальное положение ведомой руки (темнее).
Снизу — сила реакции
Рис. 10. Потеря устойчивости при управлении по схеме “ведущий-ведомый”
Второй алгоритм позволяет уменьшить силы и моменты реакции
связей. Однако возможности алгоритма ограничены в случае жесткой
связи между руками (например при манипулировании недеформируе-
мым объектом). Динамика относительного движения рабочих органов
рук и запаздывание в каналах управления могут привести к возникно-
вению автоколебаний и потере устойчивости.
В этой связи рациональным представляется применение комбини-
рованных алгоритмов управления, сочетающих возможности каждого
алгоритма: высокую точность относительного движения алгоритма об-
щей СК и уменьшение сил и моментов реакции связей при управлении
по алгоритму “ведущий-ведомый”. Разработка и исследование подоб-
ных комбинированных алгоритмов составляет предмет дальнейших
исследований.
42 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2012. № 4


