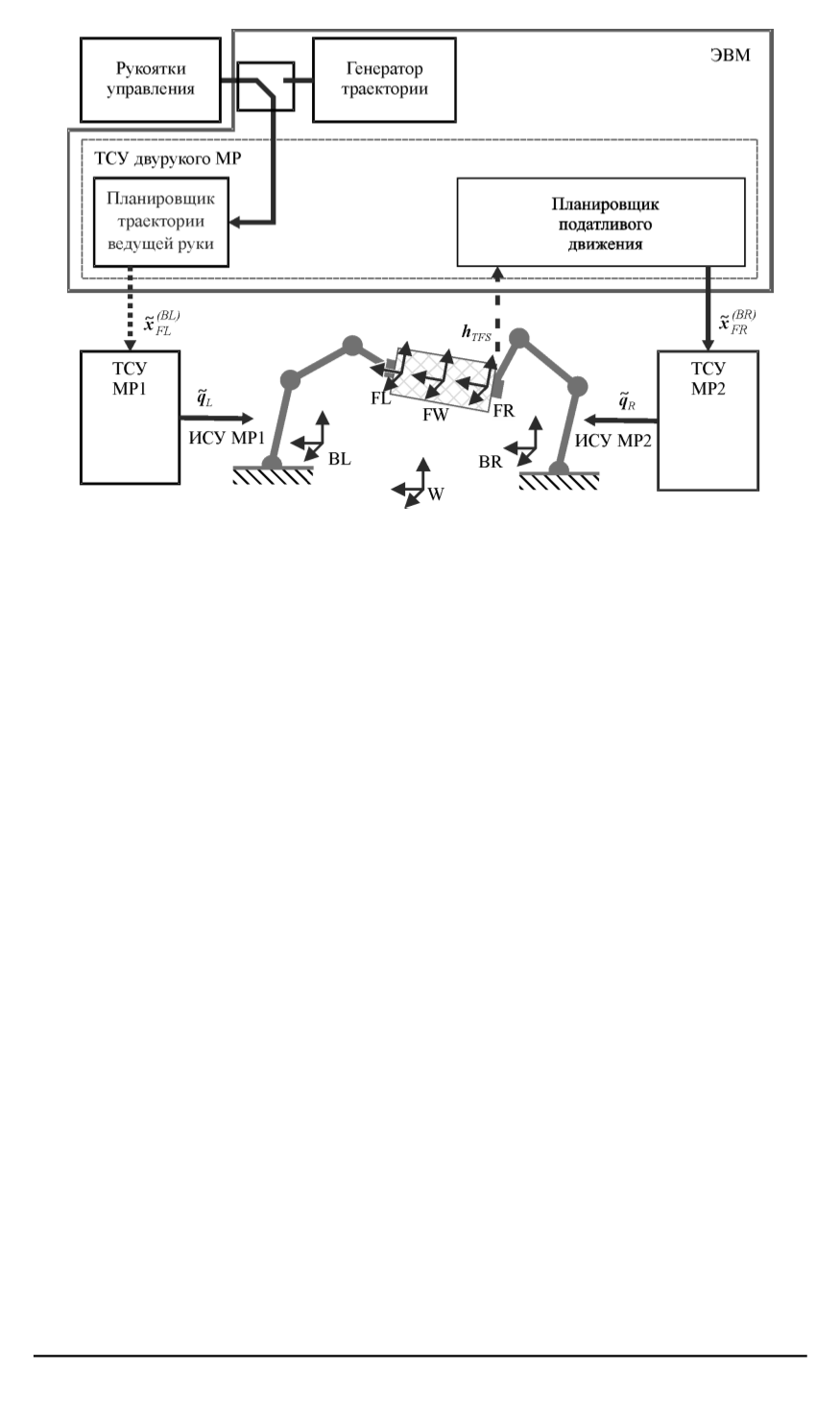
Рис. 2. Структура системы управления двурукого МР в режиме “ведущий-
ведомый”:
h
TFS
— силы и моменты, поступающие от СМД, установленного на запястье ведо-
мой руки
промышленных робота (ПР) Kawasaki FS20N, каждый робот оснащен
собственной стойкой управления (D-контроллер), реализующей функ-
ции ТСУ. Для управления ПР от ЭВМ был разработан шлюз: сервер,
размещенный в памяти контроллера, и клиент на ЭВМ, которые обме-
ниваются данными по сети Ethernet по протоколу TCP/IP. На запястье
одного из роботов был установлен шестикомпонентный силомомент-
ный датчик (СМД) фирмы Schunk. Внешний вид экспериментального
стенда представлен на рис. 3.
Далее приведены результаты проведенных экспериментов по упра-
влению двуруким МР.
Эксперимент 1.
Исследование движения одного ПР в свободном
пространстве.
На графике (рис. 4) показаны плановая траектория дви-
жения рабочей точки ПР по одной из координат (координата
x
), ре-
альная траектория, точки которой получены от ТСУ ПР, и измеренная
ошибка.
Видно, что МР отрабатывает плановую траекторию. Однако при
этом наблюдается ошибка позиционирования, зависящая от скорости
движения МР.
Эксперимент 2.
Исследование согласованного движения
(первый
алгоритм),
двух рук МР в свободном пространстве
. Плановая тра-
ектория движения общей СК, связанной с виртуальным объектом, и
реальные траектории каждой руки приведены на рис. 5. Оси на плано-
вой траектории показывают плановую ориентацию в данный момент
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2012. № 4 37


