некоторые обозначенные на рис. 2 временн ´ые отрезки взаимозависи-
мы, а именно
t
4
=
t
1
+
t
3
. Поэтому совершенно очевидное равенство
vt
4
=
d
не добавляет четвертого уравнения, так как получается сложе-
нием уравнений (2) и (4). Временнoй отрезок
t
4
удобен для аппаратной
реализации системы.
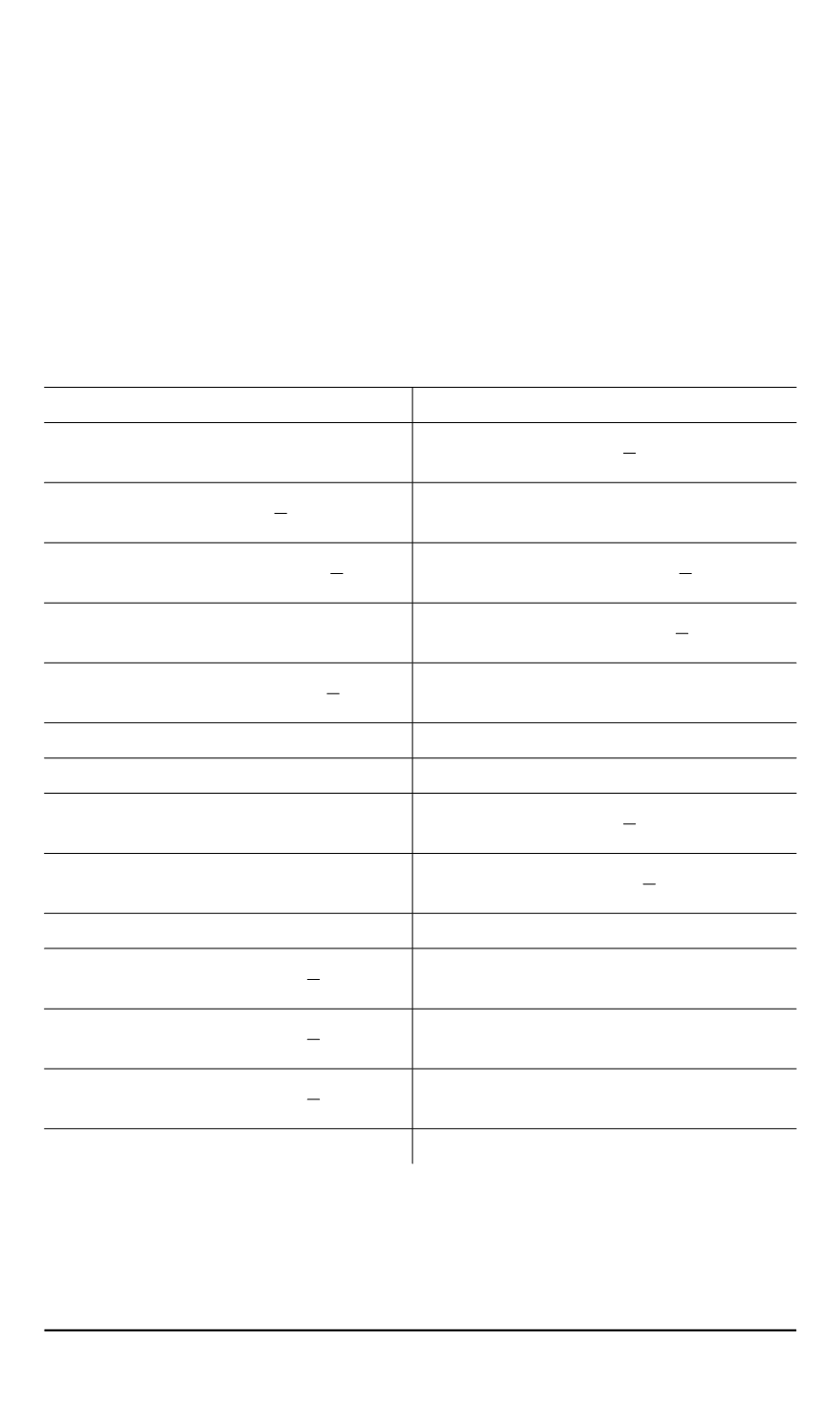
Составим дополнительные уравнения для всех четырех вариантов
пересечения рубежа, пользуясь рис. 2 и приведенными замечаниями
относительно особенностей пироэлектрических приемников. Уравне-
ния приведены в табл. 1.
Таблица 1
Дополнительные уравнения для решения системы (2)–(4)
Вариант
А
Вариант
Б
v
Δ
t
1
=
g
v
Δ
t
1
=
l
−
h
2
tg
α
v
Δ
t
2
= (
L
−
l
−
h
2
) tg
α
v
Δ
t
2
=
g
v
(Δ
t
1
+ Δ
t
2
) =
g
+
L
−
l
−
h
2
tg
α v
(Δ
t
1
+ Δ
t
2
) =
g
+
l
−
h
2
tg
α
v
(
t
1
+ Δ
t
2
) =
g
+
L
tg
α
v
(
t
1
+ Δ
t
2
) = 2
g
+
l
+
h
2
tg
α
v
(
t
2
+ Δ
t
1
) = 2
g
+
L
−
l
+
h
2
tg
α
v
(
t
2
+ Δ
t
1
) =
g
+
L
tg
α
vt
5
=
d
−
g
+ Δ
t
2
v
vt
5
=
d
−
Δ
t
1
v
+
g
Вариант
В
Вариант
Г
v
Δ
t
1
=
g
v
Δ
t
1
=
l
−
h
2
tg
α
v
Δ
t
2
=
g
v
Δ
t
2
=
L
−
l
−
h
2
tg
α
v
(Δ
t
1
+ Δ
t
2
) = 2
g
v
(Δ
t
1
+ Δ
t
2
) = (
L
−
h
) tg
α
v
(
t
1
+ Δ
t
1
) = 2
g
+
l
+
h
2
tg
α
v
(
t
1
+ Δ
t
1
) =
g
+ 2
l
tg
α
v
(
t
1
+ Δ
t
2
) = 2
g
+
l
+
h
2
tg
α
v
(
t
1
+ Δ
t
2
) =
g
+
L
tg
α
v
(
t
2
+ Δ
t
1
) = 2
g
+
l
+
h
2
tg
α
v
(
t
2
+ Δ
t
1
) =
g
+
L
tg
α
vt
5
=
d
vt
5
=
d
−
Δ
t
1
v
+Δ
t
2
v
=
d
+(
L
−
2
l
) tg
α
Среди приведенных в табл. 1 уравнений нет ни одного общего для
всех вариантов пересечения рубежа. Это означает, что для нахождения
интересующих нас параметров
v, l, h
и
g
необходимо осуществлять
выбор варианта, чтобы получить четвертое уравнение для решения
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2011. № 4 9


