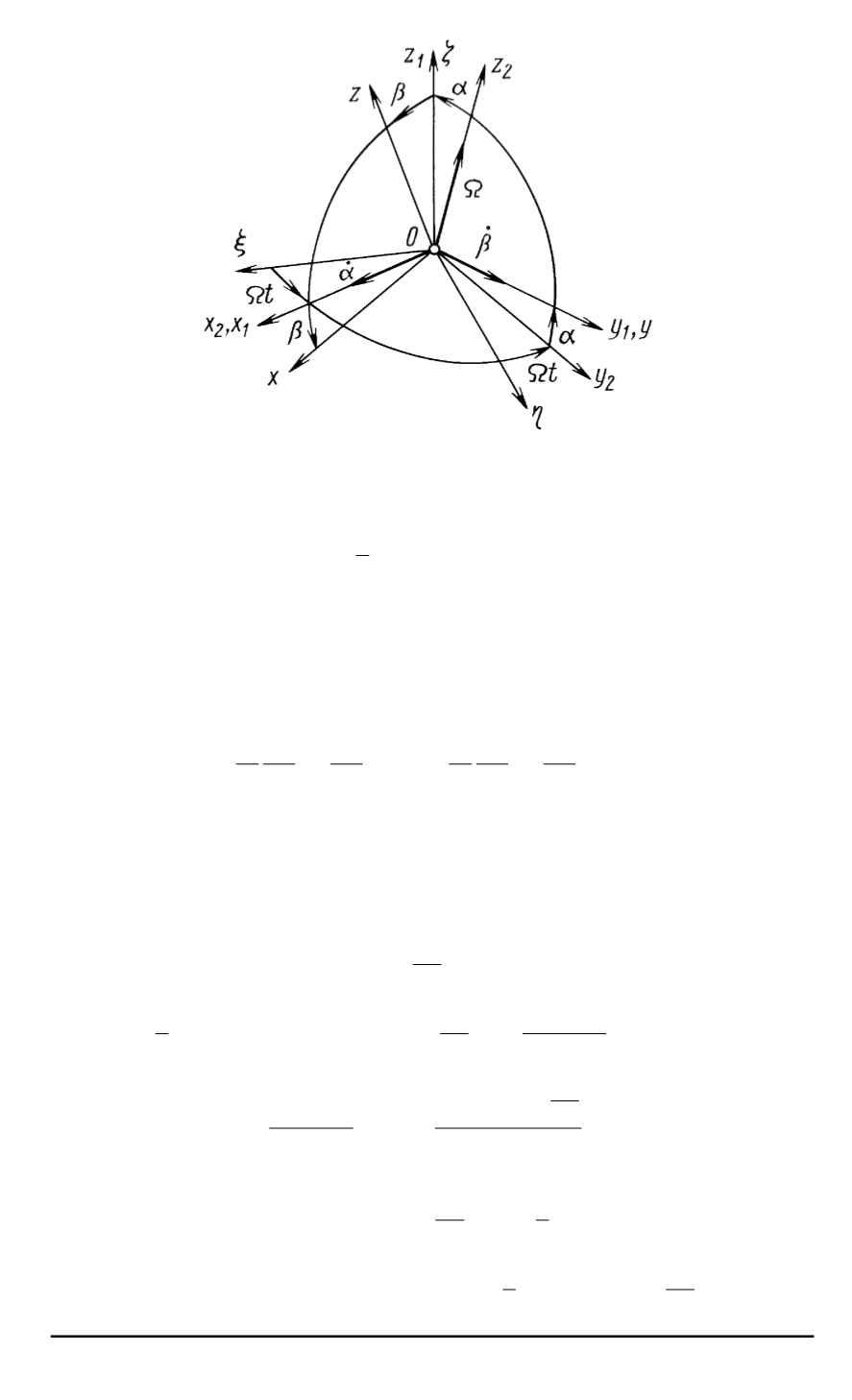
Системы координат
Π =
1
2
k
(sin
2
α
+ sin
2
β
)
,
A
,
B
,
D
—
моменты инерции ротора относительно осей
Ox
,
Oy
,
Oz
соответственно
;
A
1
,
B
1
,
D
1
—
моменты инерции кольца относительно
осей
Ox
1
,
Oy
1
,
Oz
1
соответственно
;
k
—
жесткость торсионов
.
Уравнения движения запишем в форме уравнений Лагранжа
d
dt
∂L
∂
˙
α
−
∂L
∂α
= 0
,
d
dt
∂L
∂
˙
β
−
∂L
∂β
= 0
.
(1)
Примем
A
1
=
B
1
,
A
=
B
[4]
и введем безразмерное время
τ
1
= Ω
t
.
Уравнения движения системы
(1)
с точностью до членов третьего по
-
рядка включительно имеют вид
(
A
+
A
1
)
α
00
−
(2
A
−
D
)
β
0
+
µ
k
Ω
2
+ (
D
−
A
+
D
1
−
A
1
)
¶
α
=
=
2
3
α
3
µ
D
−
A
+
D
1
−
A
1
+
k
Ω
2
¶
−
2
A
−
D
2
β
0
α
2
+
+ (
D
−
A
)
D
−
2
A
A
+
A
1
β
0
β
2
+
D
+
D
1
+
k
Ω
2
A
+
A
1
αβ
2
−
2
α
0
β
0
β
,
Aβ
00
+ (2
A
−
D
)
α
0
+
µ
D
−
A
+
k
Ω
2
¶
β
=
1
2
(2
A
−
D
)
α
0
α
2
+
+ (
D
−
A
)(
α
0
2
β
−
2
α
0
β
2
+
α
2
β
) +
2
3
β
3
µ
D
−
A
+
k
Ω
2
¶
.
(2)
66 ISSN 0236-3933.
Вестник МГТУ им
.
Н
.
Э
.
Баумана
.
Сер
. "
Приборостроение
". 2004.
№
1


