Рис
. 4.
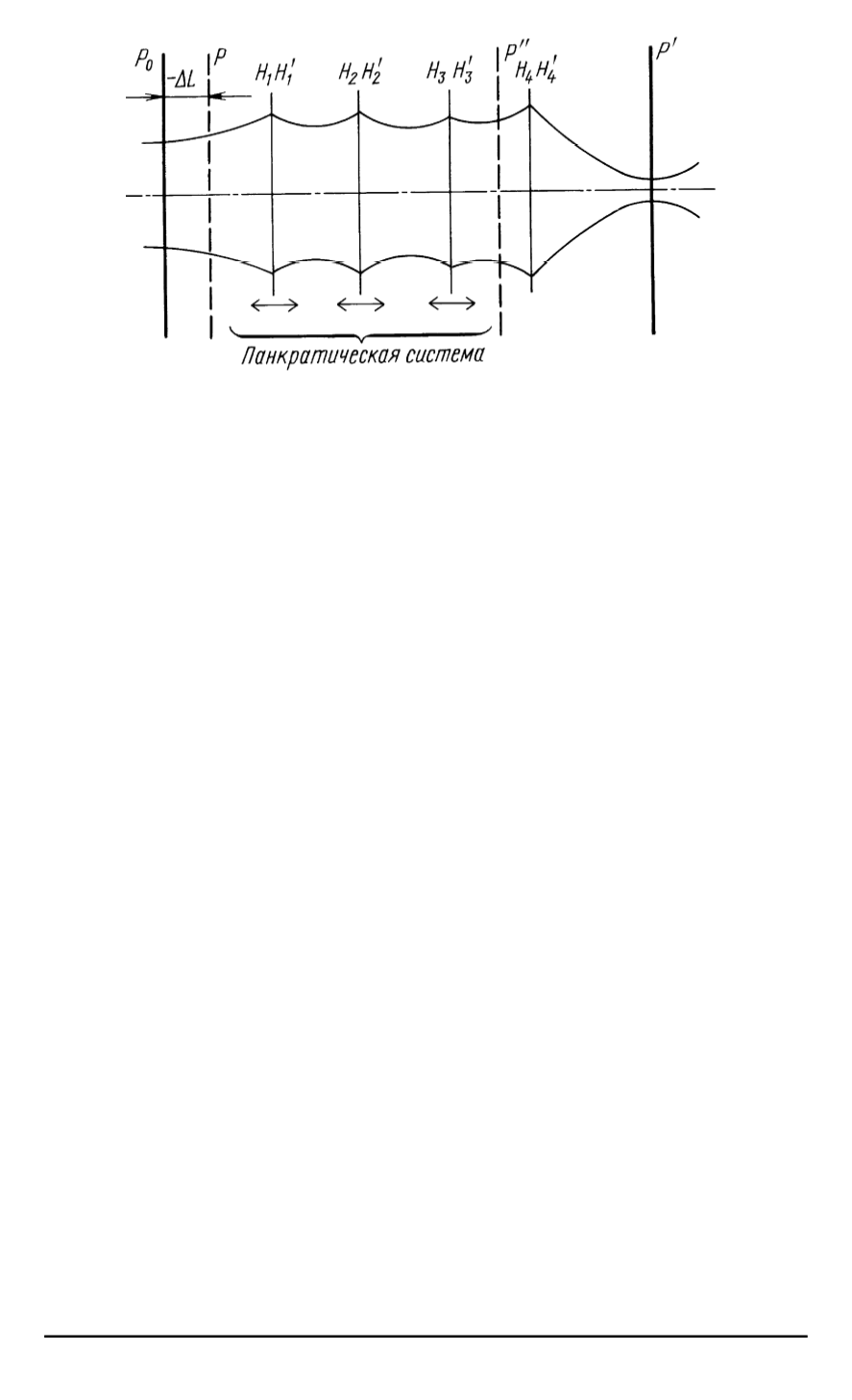
Схема панкратического фокусирующего объектива
:
P
—
плоскость предмета
;
P
0
—
плоскость предмета в начальном положении
;
P
0
—
плоскость изображения
;
P
00
—
плоскость промежуточного изображения
;
H
i
и
H
0
i
,
i
= 1
,
2
,
3
,
4
, —
передняя и задняя главные плоскости соответственно
;
∆
L
—
ве
-
личина смещения
Следовательно
,
для фокусировки излучения необходимо обеспе
-
чить
β
≤
1
для всего диапазона перепада увеличений
.
Рассчитаем панкратическую систему при
i
1
=
−
1
,
i
3
=
−
1
,
7333
,
Z
0
=
−
75
мм
,
Z
0
0
= 88
,
9497
мм
,
обеспечивающую при осевом пере
-
мещении компонентов в интервале
−
50
. . .
50
мм перепад увеличений
M
= 100
.
При этом смещение плоскости изображения от начального
положения компенсируем для
x
1
=
x
2
= 0
,
x
3
=
−
50
мм и
x
4
= 50
мм
(
производим трехточечную компенсацию в центре и на краях интерва
-
ла
,
см
.
рис
. 2).
Для проведения расчета согласно предложенному алгоритму была
разработана программа
,
реализованная в среде
MathCAD
и
Microsoft
Visual
С
++.
Рассчитанную систему реверсируем и в результате получа
-
ем систему
,
обеспечивающую изменение линейного увеличения в диа
-
пазоне
β
=
−
3
,
2441
x
. . .
−
0
,
0324
x
,
для которой плоскость предмета сме
-
щается по закону
,
показанному на рис
. 5.
Дополняя систему последним
компонентом с линейным увеличением
β
= 0
,
3083
x
,
получаем панкра
-
тический объектив с изменением линейного увеличения в диапазоне
β
=
−
1
x
. . .
−
0
,
01
x
.
Параметры панкратического фокусирующего объектива следую
-
щие
.
Диапазон перемещения компонентов панкратической системы
−
50
. . .
50
мм
.
Вид компенсации смещения плоскости предмета
—
оптическая трехточечная компенсация для
x
1
=
x
2
= 0
,
x
3
=
−
50
,
x
4
= 50
.
Передаточные коэффициенты перемещения для каждого ком
-
понента
:
i
1
= 1
,
7333
,
i
2
= 2
,
2101
,
i
3
= 1
.
Задние фокусные расстояния
ISSN 0236-3933.
Вестник МГТУ им
.
Н
.
Э
.
Баумана
.
Сер
. "
Приборостроение
". 2004.
№
1 15


