где
χ
1
= 0
для эхо
-
сигналов от плоской однородной поверхности
;
χ
1
=
χ
2
=
χ
3
= 1
для эхо
-
сигналов от плоской неоднородной поверх
-
ности с расположенными на ней неоднородностями малых угловых
размеров
;
для эхо
-
сигналов от плоской неоднородной поверхности с
одной неоднородностью больших угловых размеров
(
n
= 1
)
χ
1
=
V
x
V
y
α
2
п
cos
θ
+
α
2
п
α
2
и
+
V
2
y
+
V
2
y
α
2
и
[
α
2
п
(
α
2
и
+
V
2
x
cos
2
θ
) +
V
2
x
α
2
и
cos
2
θ
]
,
1
2
,
χ
2
=
α
2
и
α
2
п
α
2
п
α
2
и
+
V
2
y
+
V
2
y
α
2
и
, χ
3
=
α
2
и
α
2
п
[
α
2
п
(
α
2
и
+
V
2
x
cos
2
θ
) +
V
2
x
α
2
и
cos
2
θ
]
.
Функция
u
c
1
(
t
)
определяется интегралом Дюамеля
u
c
1
(
t
) =
t
0
g
(
τ
)
u
вх
(
t
−
τ
)
dτ ,
где
u
вх
(
t
) = exp
−
4 (
ct
−
2
R
)
2
(
cτ
эф
)
2
,
g
(
t
)
—
импульсная переходная ха
-
рактеристика ФПУ
.
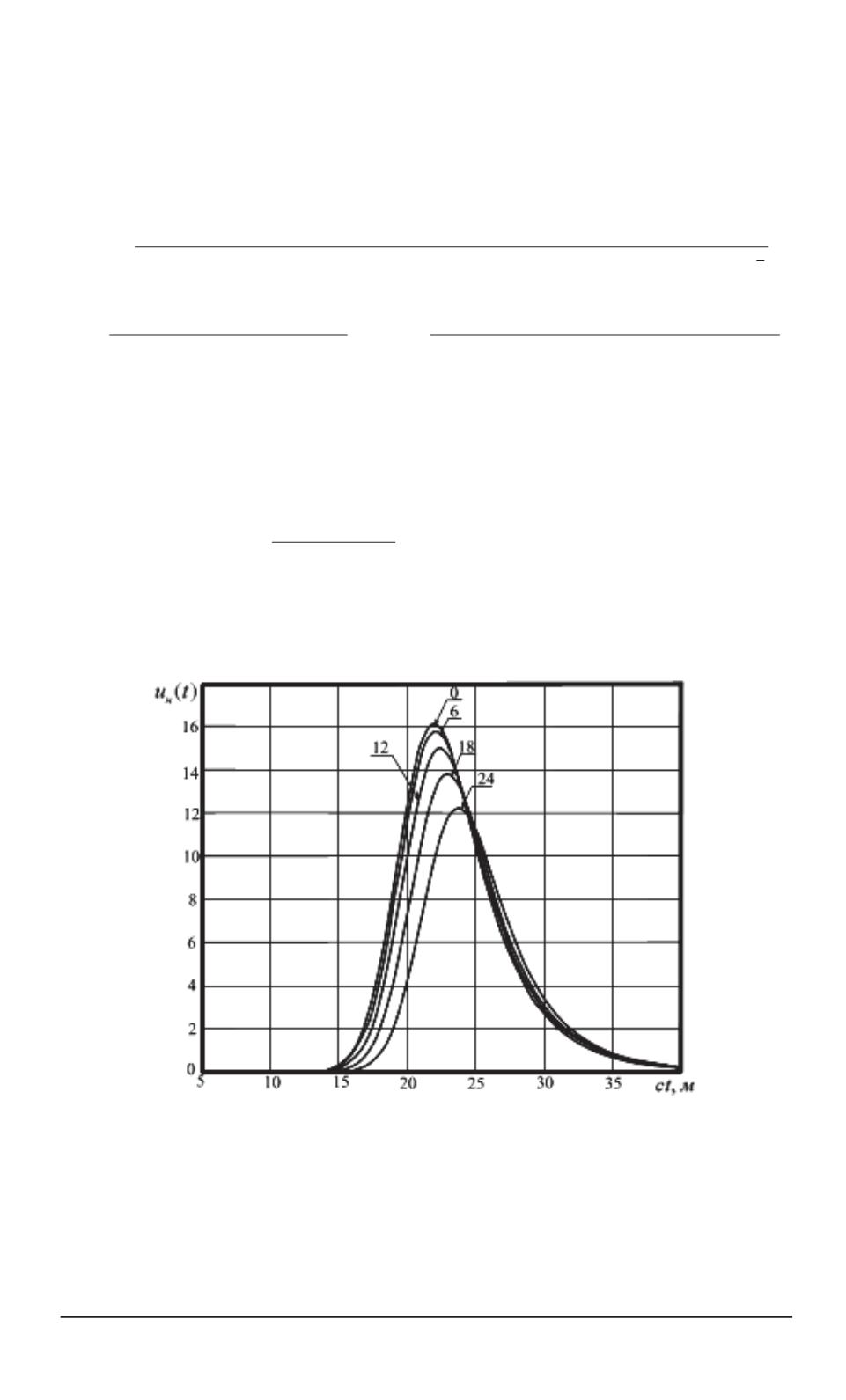
На рис
. 2
приведены результаты моделирования сигнала
,
отражен
-
ного от однородной поверхности после преобразования ФПУ
.
Рис
. 2.
Нормированная зависимость эхо
-
сигналапосле приемаи преобразования
ФПУ при различных углах подхода
(
цифры на графике указаны в градусах
):
R
= 10
м
,
x
δ
= 2
см
,
α
и
= 1
◦
,
α
п
= 1
◦
При выводе соотношения
(12)
были рассмотрены вопросы оценки
временной структуры эхо
-
сигнала при вариациях средних значений па
-
раметров оптической среды
,
геометрии и сигнала зондирования
.
При
114 ISSN 0236-3933.
Вестник МГТУ им
.
Н
.
Э
.
Баумана
.
Сер
. “
Приборостроение
”. 2005.
№
3


