Рис. 5. Движение робота вдоль разрывного тротуара
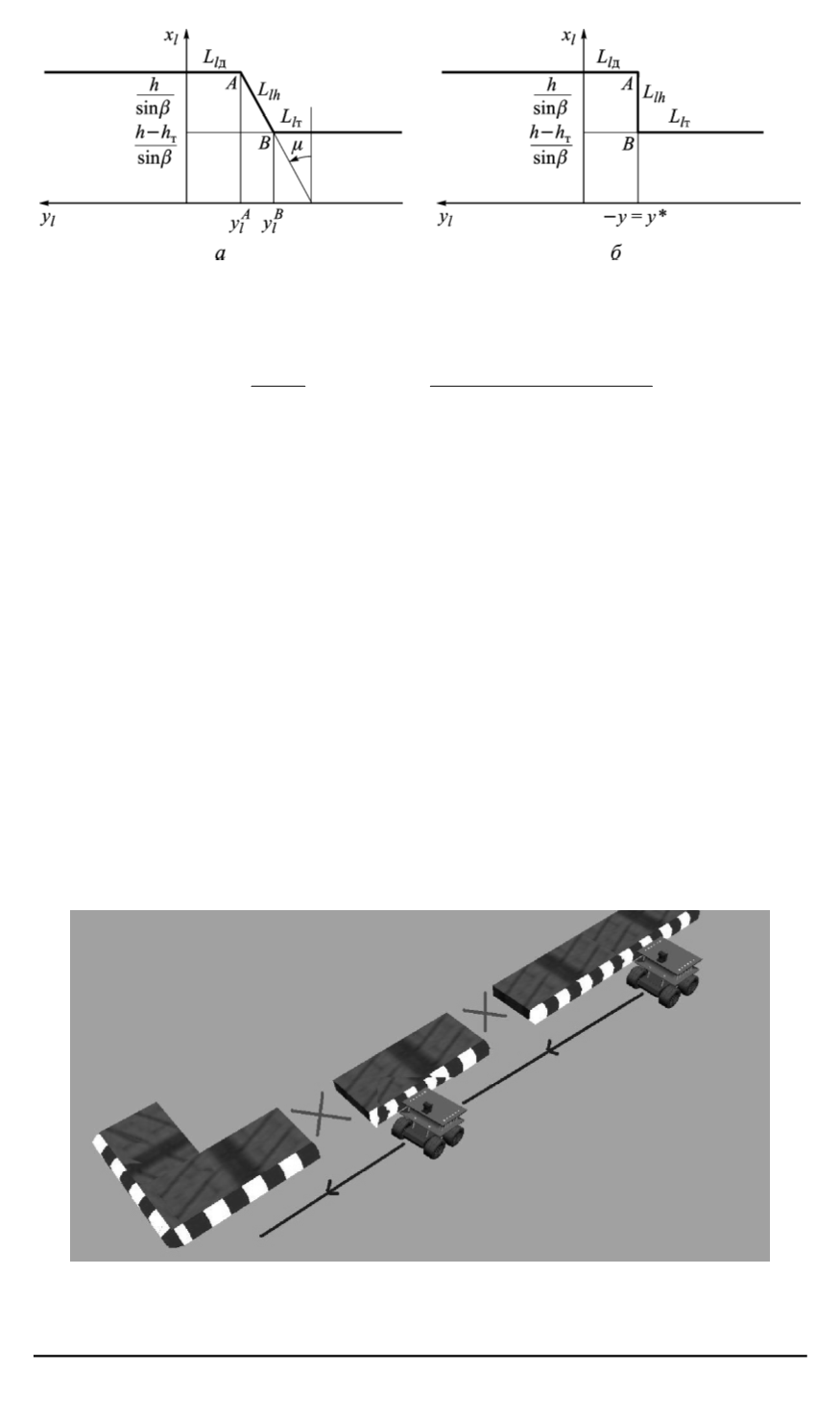
выражение для закона управления (3):
ϕ
=
−
1
cos
β
tg
μ
;
y
=
cos
ϕ
(
k
b
Y
A
l
−
k
a
Y
B
l
)
k
a
−
k
b
,
(12)
где
k
a
=
h
ctg
β
,
k
b
= (
h
−
h
t
) ctg
β
.
Рассмотрим алгоритм управления роботом в случае движения
вдоль разрывного тротуара (рис. 6). В каждый момент времени от 3D
дальномера на борту получаем набор сканов, имеющих разные углы
в вертикальной плоскости и, следовательно, в разных точках пересе-
кающих тротуар. В том случае, когда робот должен миновать разрыв
в тротуаре (например, перекресток), необходимо выбрать ближайший
скан, которому соответствуют приемлемые значения параметров
ϕ
и
y
из (12).
Экспериментальные исследования.
Для реализации закона упра-
вления угловой скоростью движения автономного МР в форме (3) не-
обходимо выбрать значения параметров управления
k
1
, k
2
, для чего
выполним компьютерное моделирование движения МР на динами-
ческой модели, описываемой системой линейных дифференциальных
уравнений (7). Проверку полученного результата проведем путем мо-
Рис. 6. Движение МР под некоторым углом и параллельно вдоль разрывного
тротуара в системе координатах дальномера
x
l
,
y
l
,
z
l
54 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2011. № 1


