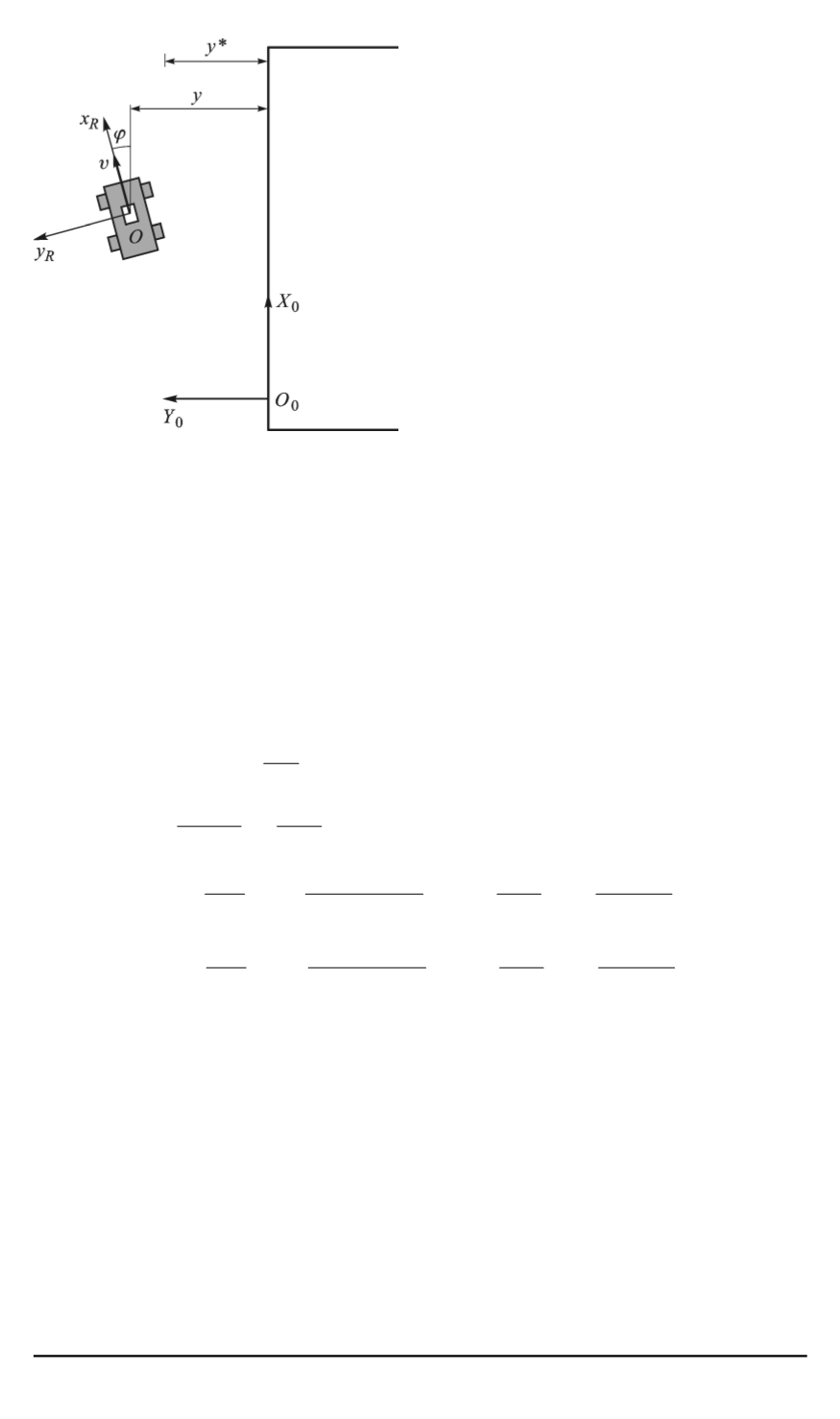
Рис. 2. Схема движения робота вдоль
непрерывного тротуара
схема движения колесного МР с
соответствующими системами ко-
ординат. Учитывая динамические
свойства робота, а также наличие
исполнительной системы [8], полу-
чим уравнения движения МР. Счи-
таем, что исполнительная система
МР представляет собой два элек-
тромеханических привода, выпол-
ненных на базе двигателей посто-
янного тока, каждый из которых
приводит в движение ведущие ко-
леса правого и левого бортов шас-
си транспортного средства МР. То-
гда уравнения, связывающие ком-
поненты фазового вектора с упра-
вляющими напряжениями, можно
записать следующим образом:
∙
x
=
υ
cos
ϕ
;
∙
y
=
υ
sin
ϕ,
∙
ϕ
=
ω
;
∙
υ
=
−
bω
2
+
1
ρm
(
τ
L
+
τ
R
);
∙
ω
=
bmωυ
i
z
+
W
2
ρi
z
(
τ
R
−
τ
L
);
∙
τ
L
=
−
R
M
2
L
τ
L
−
i
2
p
k
M
k
T
Г
k
y
Lρ
υ
−
ωW
2
+
i
p
k
M
k
y
L
U
L
;
∙
τ
R
=
−
R
M
2
L
τ
R
−
i
2
p
k
M
k
T
Г
k
y
Lρ
υ
+
ωW
2
+
i
p
k
M
k
y
L
U
R
,
(1)
где
b
— координата центра масс платформы, лежащего на оси симме-
трии;
m
— масса робота;
W
— расстояние между центрами ведущих
колес;
i
z
— момент инерции платформы относительно вертикальной
оси
Z
R
;
ρ
— радиус колеса;
R
M
— сопротивление обмотки якоря ис-
полнительного двигателя;
i
P
— передаточное отношение редуктора;
k
M
— коэффициент, связывающий ток и развиваемый двигателем мо-
мент;
k
тг
— коэффициент передачи тахогенератора;
k
y
— коэффициент
усилителя мощности;
L
— индуктивность обмотки якоря;
U
R
, U
L
—
напряжения, подаваемые на обмотку якоря.
Соотношения (1) представляют собой систему нелинейных диф-
ференциальных уравнений седьмого порядка с фазовым вектором
48 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2011. № 1


