Исследуем теперь случай, когда переходный процесс имеет апери-
одический характер, т.е. корни характеристического уравнения (8) не
только лежат в левой полуполоскости, но еще и действительны.
Запишем соотношение коэффициентов кубического уравнения (8),
при выполнении которого все три корня действительны [9]:
p
3
27
+
q
2
4
6
0
,
(10)
где
p
=
−
b
2
3
a
2
+
c
a
,
q
=
2
b
3
27
a
3
−
bc
3
a
2
+
d
a
,
a
= 1
, b
=
D, c
=
Ek
1
, d
=
Ek
2
υ
c
.
Тогда одновременное выполнение условий (9), (10) позволяет вы-
делить область значений параметров
k
1
, k
2
, обеспечивающих аперио-
дический переходный процесс.
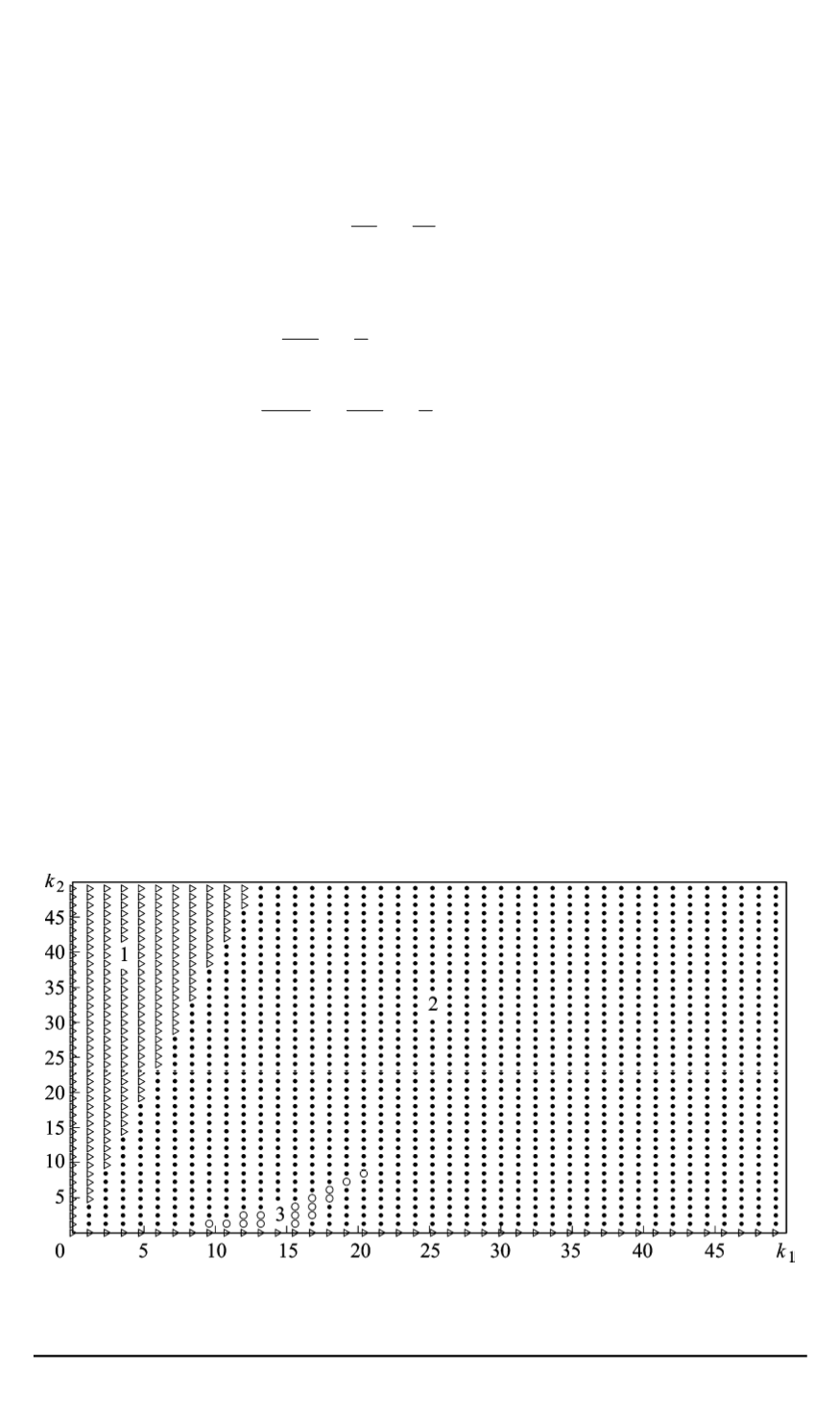
На рис. 3 показана плоскость параметров
k
1
, k
2
. В области 1 си-
стема (в приращениях) неустойчива, в области 2 — переходный про-
цесс имеет колебательный характер, а в области 3 — апериодический.
Безусловно, полученный результат имеет приближенной характер, по-
скольку мы рассматривали систему в малых отклонениях от программ-
ной траектории.
Определение параметров
ϕ, y
, входящих в закон управления.
Как было отмечено ранее, робот, оснащенный лазерным дальноме-
ром, движется по плоской дороге, получая в каждый момент времени
Рис. 3. Области значений параметров
k
1
,
k
2
, при которых траектория движения
МР неустойчива (1), имеет колебательный (2) и апериодический (3) характер
52 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2011. № 1


