изображения — сечение рельефа в плоскости дороги, тротуара и пара-
пета. Необходимо определить угол
ϕ
и расстояние
y
между роботом и
тротуаром по данным лазерного дальномера.
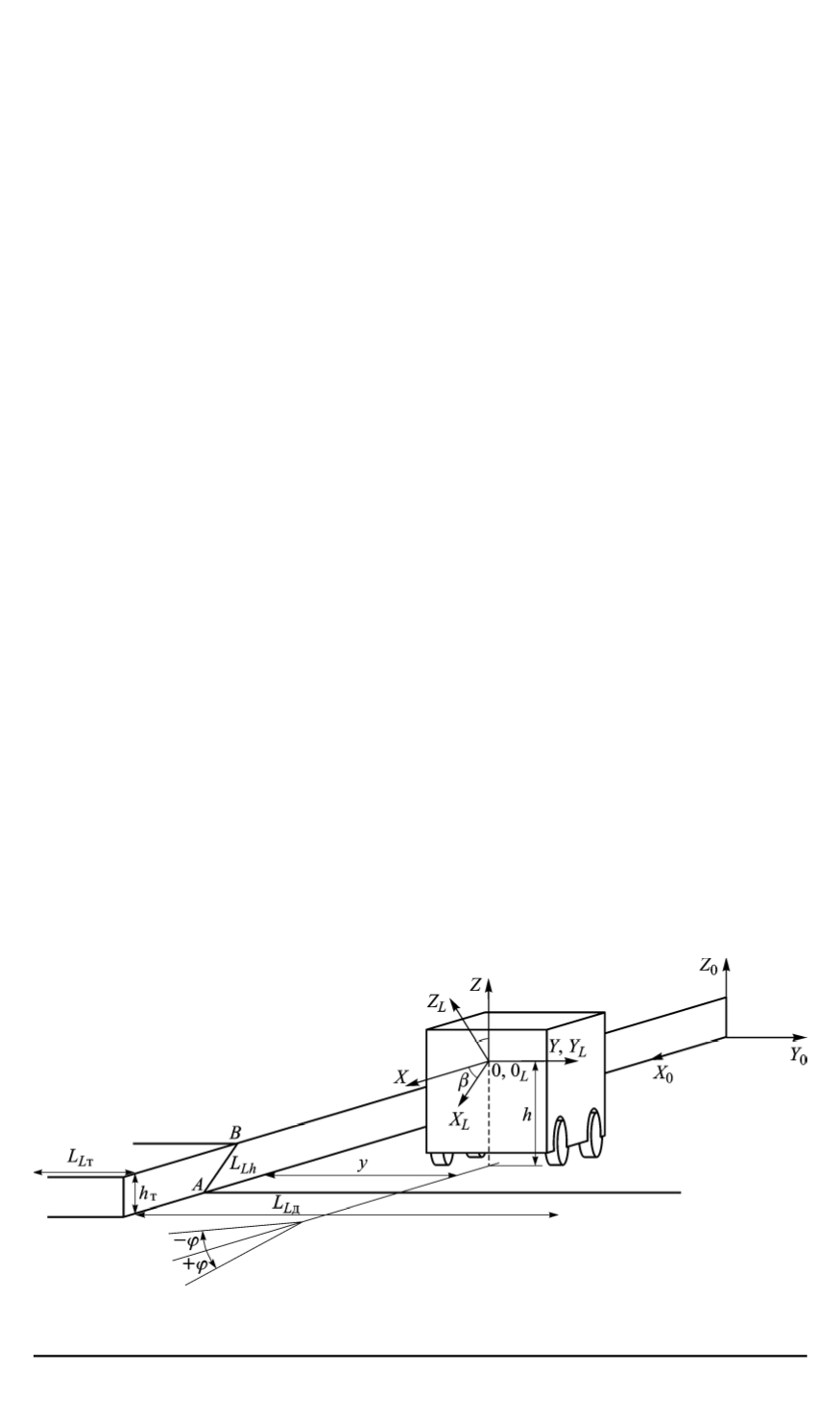
Угол и расстояние между роботом и тротуаром вычисляются в ре-
зультате определения линии пересечения плоскостей дороги, тротуара
и парапета каждым сканом дальномера относительно координат даль-
номера в процессе движения робота. Приведем уравнения линий пере-
сечения дороги
L
ld
, тротуара
L
lt
и парапета
L
lh
, связанные с функцией
сечения дальномера:
L
ld
= sin
βX
l
−
h
= 0;
L
lt
= sin
βX
l
−
h
+
h
t
= 0;
L
lh
= sin
ϕ
cos
βX
/
+ cos
ϕY
l
+
y
= 0
,
(11)
где
β
— угол отклонения плоскости скана от горизонтальной плос-
кости;
h
— расстояние от центра координат робота до дороги;
h
t
—
высота тротуара;
ϕ
— угол между продольной осью робота и напра-
влением вдоль тротуара;
y
— получаемое расстояние между роботом
и тротуаром. На рис. 4 показано движение МР вдоль тротуара.
Ранее были получены выражения, описывающие линию пересече-
ния плоскости дальномера с видимым рельефом в системе координат,
связанной с дальномером, и определены зависимости угла поворо-
та робота и расстояния между ним и тротуаром от вида полученной
линии.
На рис. 5 показаны схемы движения робота вдоль непрерывного
тротуара. Угол наклона отрезка
АВ
, а также координаты его конце-
вых точек позволяют легко вычислить параметры
ϕ, y
, входящие в
Рис. 4. Схема движения МР вдоль тротуара
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2011. № 1 53


