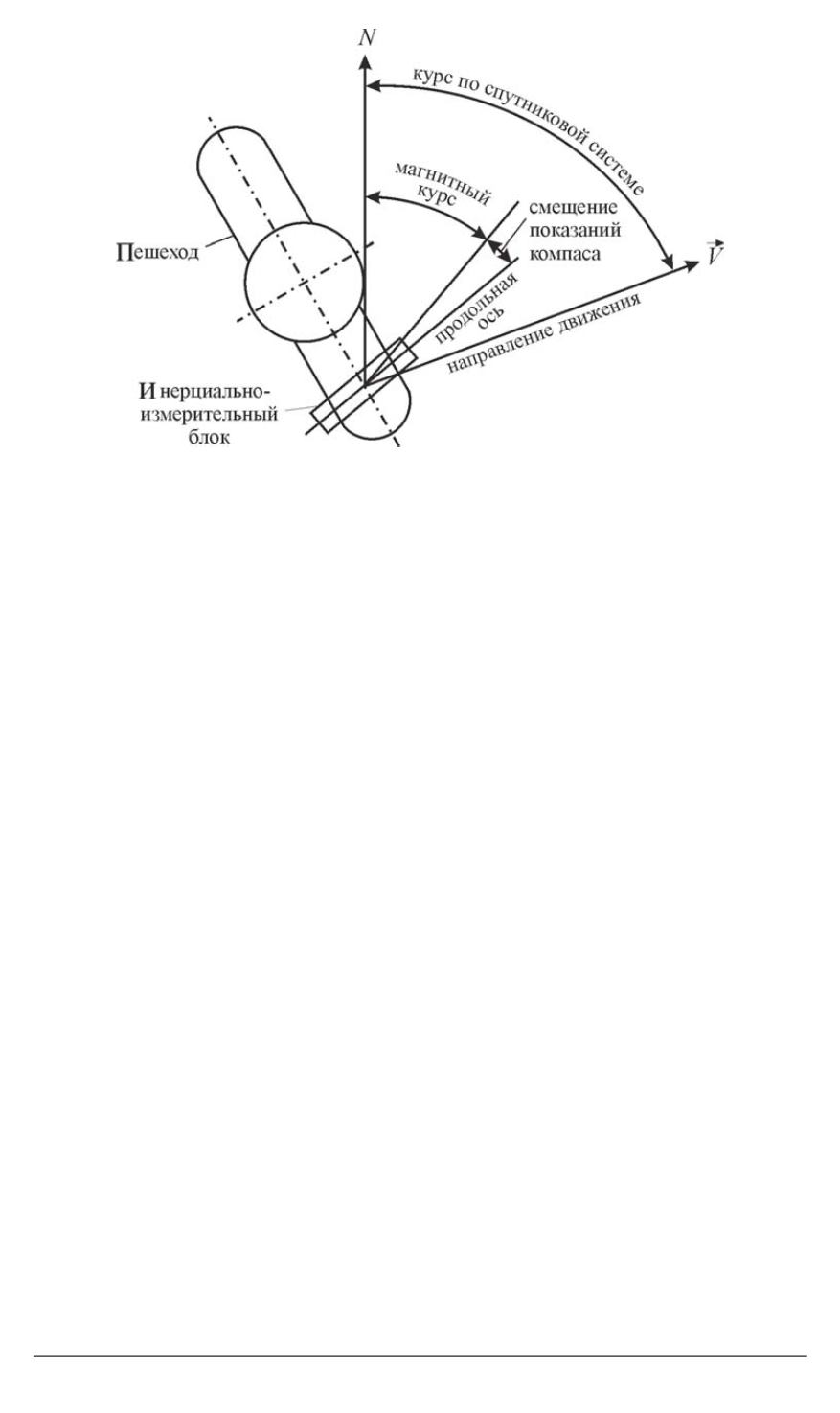
Рис. 9. Вид установки измерительного блока (в плане)
ственно на маршруте при отсутствии сигналов спутниковой системы.
Для этого необходимо, чтобы инерциально-измерительный блок какое-
то время остался неподвижным. Осредненный за это время сигнал в
дальнейшем компенсируется в измерениях. Чем длительнее и чаще
стоянки, тем лучше компенсируется гироскопический дрейф, но тем
больше возражений вызывает этот режим у пользователя.
Калибровка с помощью спутниковых навигационных систем.
Калибровка курсового угла установки комплекса.
На рис. 9 приведена
схема крепления инерциально-измерительного блока на теле пеше-
хода.
Вплоть до получения первых достоверных курсовых показаний
спутниковой системы в качестве выходного сигнала используются по-
казания магнитного компаса. В общем случае направление, опреде-
ляемоес помощью магнитного компаса, несовпадает с истинным
направлением движения пешехода по следующим причинам: изме-
рительный блок закреплен таким образом, что его продольная ось не
совпадает с направлением движения; присутствует боковая составляю-
щая скорости движения; показания компаса искажены возмущениями
магнитного поля.
При появлении спутниковых измерений эти ошибки компенсиру-
ются:
α
=
H
(
СНС
)
−
H
(
компаса
)
.
Истинное направление движения можно определить с помощью
спутниковой навигационной системы. При прохождении маршрута из-
мениться могут как ориентация измерительного блока относительно
72 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2006. № 3


