функционирования в любом окружении — на открытом пространстве,
в лесу, горах, в районах высотной городской застройки, а также в за-
крытых помещениях (в зданиях, шахтах и т.д.). Для обеспечения такой
информации устройство должно интегрировать показания инерциаль-
ных (акселерометров и гироскопов) и неинерциальных измерительных
датчиков (приемника спутниковых сигналов GPS/ГЛОНАСС, магнито-
метров, баровысотомера).
При выполнении условия прямой видимости между антенной и
необходимым количеством спутников показания комплекса основыва-
ются на данных GPS, одновременно должны компенсироваться пара-
метры автономной части комплекса (курс, длина шагов). При недоста-
точном качестве связи со спутниками (например, в районах высотной
застройки) показания GPS должны корректироваться, а при полном
ее отсутствии (например, в закрытых помещениях) — восполняться
автономными источниками измерений. Основные ошибки в определе-
нии местоположения пешехода связаны с погрешностями определения
азимута движения. Использование магнитного компаса и гироскопа в
совокупности с применением оригинальных методов обработки по-
зволяют выделить преимущества каждого из датчиков и компенсиро-
вать их недостатки. Сравнение сигналов датчиков при изменении силы
магнитного поля поможет определить и скомпенсировать магнитные
возмущения. В отсутствие таких возмущений непрерывное измере-
ние азимута позволит оценить и скомпенсировать смещение нуля и
погрешность масштабного коэффициента гироскопа.
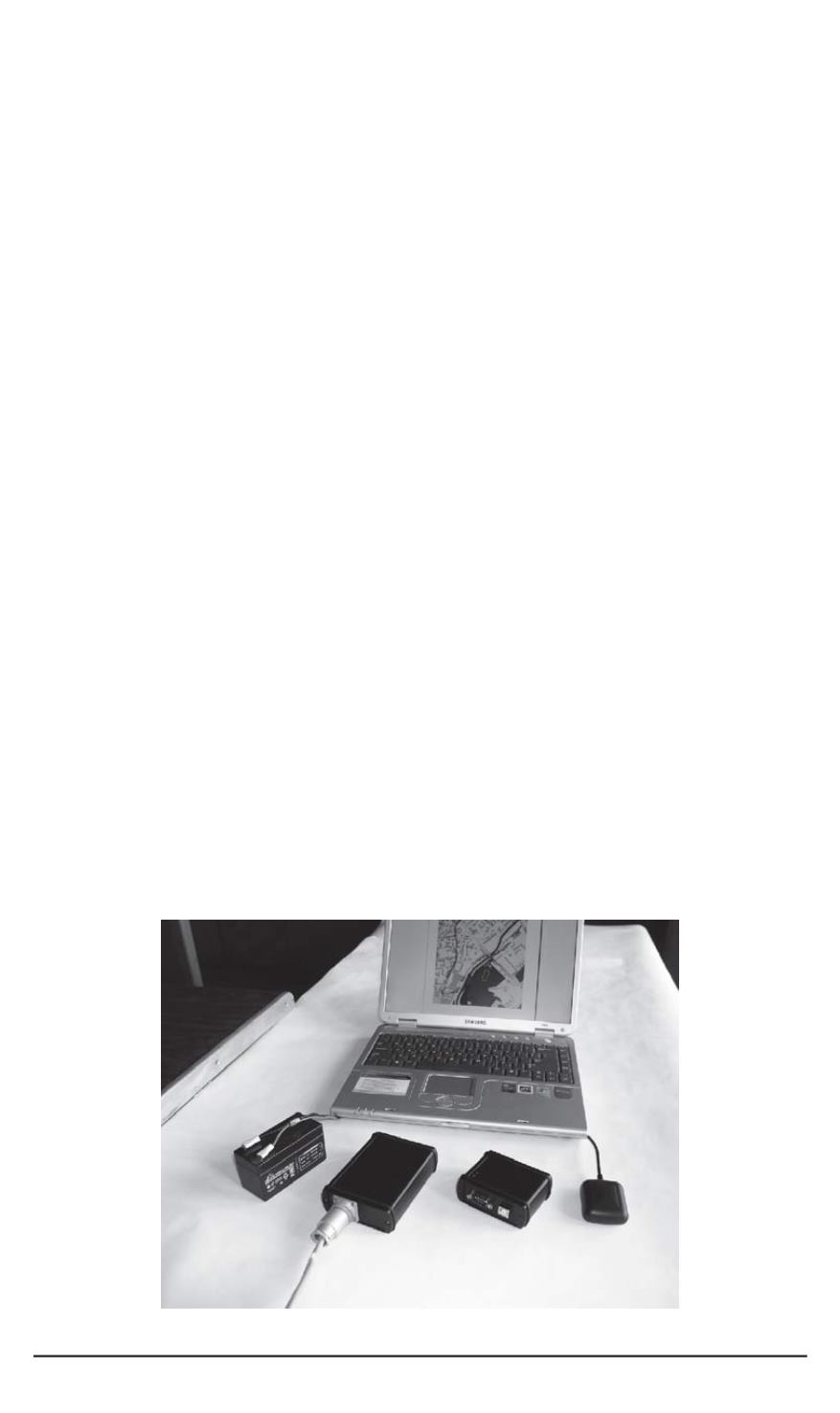
Состав персонального навигационного комплекса.
Персональ-
ный навигационный комплекс состоит из следующих модулей (рис. 1):
— инерциально-измерительный блок (модуль автономных измери-
телей) — включает в себя в едином корпусе трехосные блоки MEMS-
Рис. 1. Состав персонального навигационного комплекса
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2006. № 3 65


