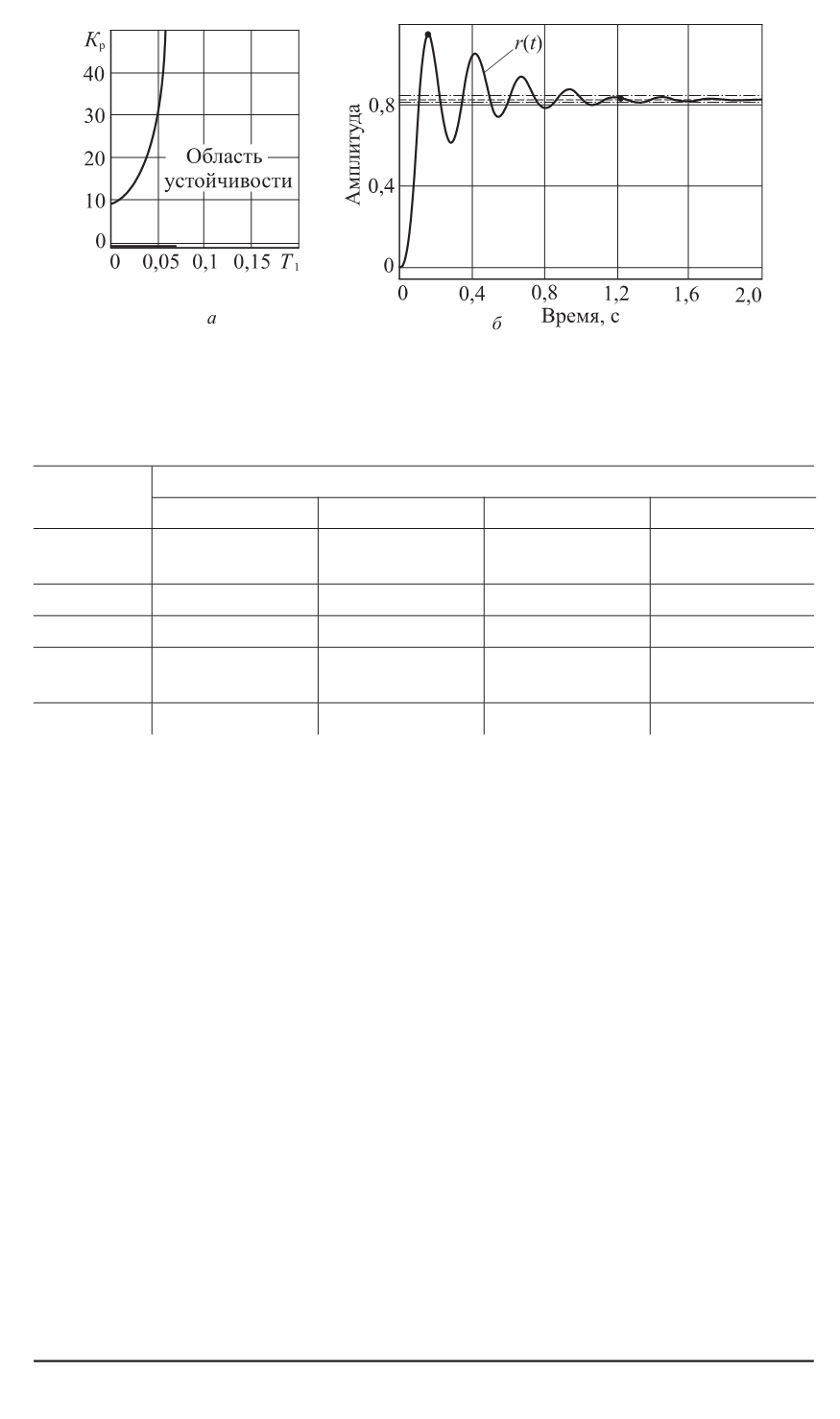
Рис. 6. Графическое представление области устойчивости технической системы
(п. 5, см. табл. 1) (
а
) и переходного процесса (
б
) при
T
1
= 0
,
1
с,
K
р
= 5
,
0
с
−
1
и
τ
d
= 0
,
0141
с
Таблица 6
Параметры
τ
d
, c
−
1
K
p
= 1
,
0
K
p
= 5
,
0
K
p
= 10
,
0
K
p
= 20
,
0
T
1
= 0
,
05
с
0,5675
0,0527
Нет запаса
устойчивости
Нет запаса
устойчивости
T
1
= 0
,
10
с
0,5682
0,0141
То же
То же
T
1
= 0
,
20
с
0,5021
0,0013
–//–
–//–
T
1
= 0
,
30
с
0,3975
Нет запаса
устойчивости
–//–
–//–
T
1
= 0
,
50
с
0,0386
То же
–//–
–//–
Результаты исследований и расчетов, приведенные в настоящей
статье, позволяют назначать требования к динамическим характери-
стикам человека-оператора при управлении объектами определенного
класса. В тех случаях, когда требуемые предельные значения динами-
ческих характеристик не достижимы для человека-оператора, необхо-
димо вводить динамическую коррекцию в контур управления системы
человек–машина или изменять динамику объекта управления.
СПИСОК ЛИТЕРАТУРЫ
1. S h e r i d a n T. B., F e r r e l l W. R. Man-Machine Systems. – Cambridge-London:
The MIT Press, 1974.
2. P o u p k o f f K. The optimization of connection between Human being and
techniques in Man-Machine Systems // Preprint of the IFAC-IFORS Symposium
(Warna, Bulgaria, 8–10 oct. 1974. – P. 419–426.
3. П у п к о в К. А., К а п а л и н В. И., Ю щ е н к о А. С. Функциональные
ряды в теории нелинейных систем. – М.: Наука, 1976. – 448 с.
4. П у п к о в К. А., У с т ю ж а н и н А. Д. Идентификация и оценка
обученности в динамических человеко-машинных системах // Вестник МГТУ
им. Н.Э. Баумана. Сер. “Приборостроение”. – 2003. – № 4. – С. 95–103.
124 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2006. № 1


