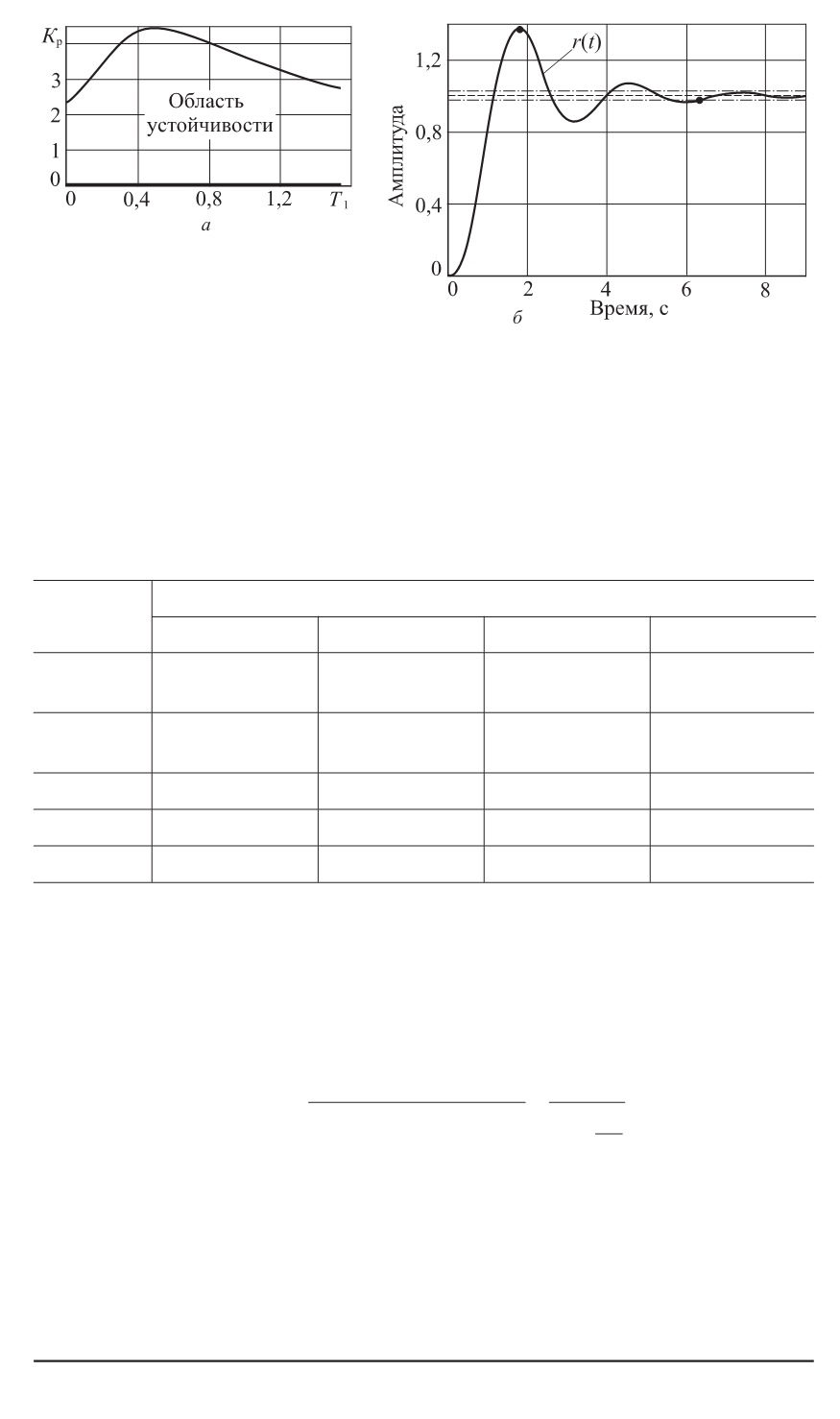
Рис. 4. Графическое представление области устойчивости системы (п. 3, см.
табл. 1) (
а
) и переходного процесса для
T
1
= 0
,
75
с,
K
р
= 2
,
0
с
−
1
и
τ
d
= 0
,
0776
с
устойчивости не менее
30
◦
, приведены в табл. 4, из которой видно, что
данным объектом человек-оператор может управлять при достаточно
широком диапазоне значений запаздывания
τ
d
.
Таблица 4
Параметры
τ
d
, c
−
1
K
p
= 1
,
0
K
p
= 2
,
0
K
p
= 2
,
5
K
p
= 3
,
0
T
1
= 0
,
1
с
0,1575
Нет запаса
устойчивости
Нет запаса
устойчивocти
Неустойчивая
система
T
1
= 0
,
25
с
0,2916
То же
То же
Нет запаса
устойчивости
T
1
= 0
,
50
с
0,4709
0,0442
–//–
То же
T
1
= 0
,
75
с
0,5780
0,0776
–//–
–//–
T
1
= 1
,
0
с
0,5982
0,0324
–//–
–//–
Переходный процесс в системе при единичном воздействии при
T
1
= 0
,
75
с;
K
р
= 2
с
−
1
и
τ
d
= 0
,
0776
с приведен на рис. 4,
б
.
Для объекта управления (п. 4, см. табл. 1) передаточная функция
разомкнутой системы имеет вид
W
(
s
) =
K
П
e
−
τs
(
T
1
s
+ 1)
(
T
2
2
s
2
+ 2
ξ
2
T
2
s
+ 1)
·
1
s
−
1
T
а
.
(8)
Область устойчивости для данной системы приведена на рис. 5,
а
,
а допустимые значения запаздывания
τ
d
приведены в табл. 5. Из табли-
цы следует, что для управления таким объектом допустимые значения
запаздывания весьма малы, что свидетельствует о сложности динами-
ки объекта управления.
122 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2006. № 1


