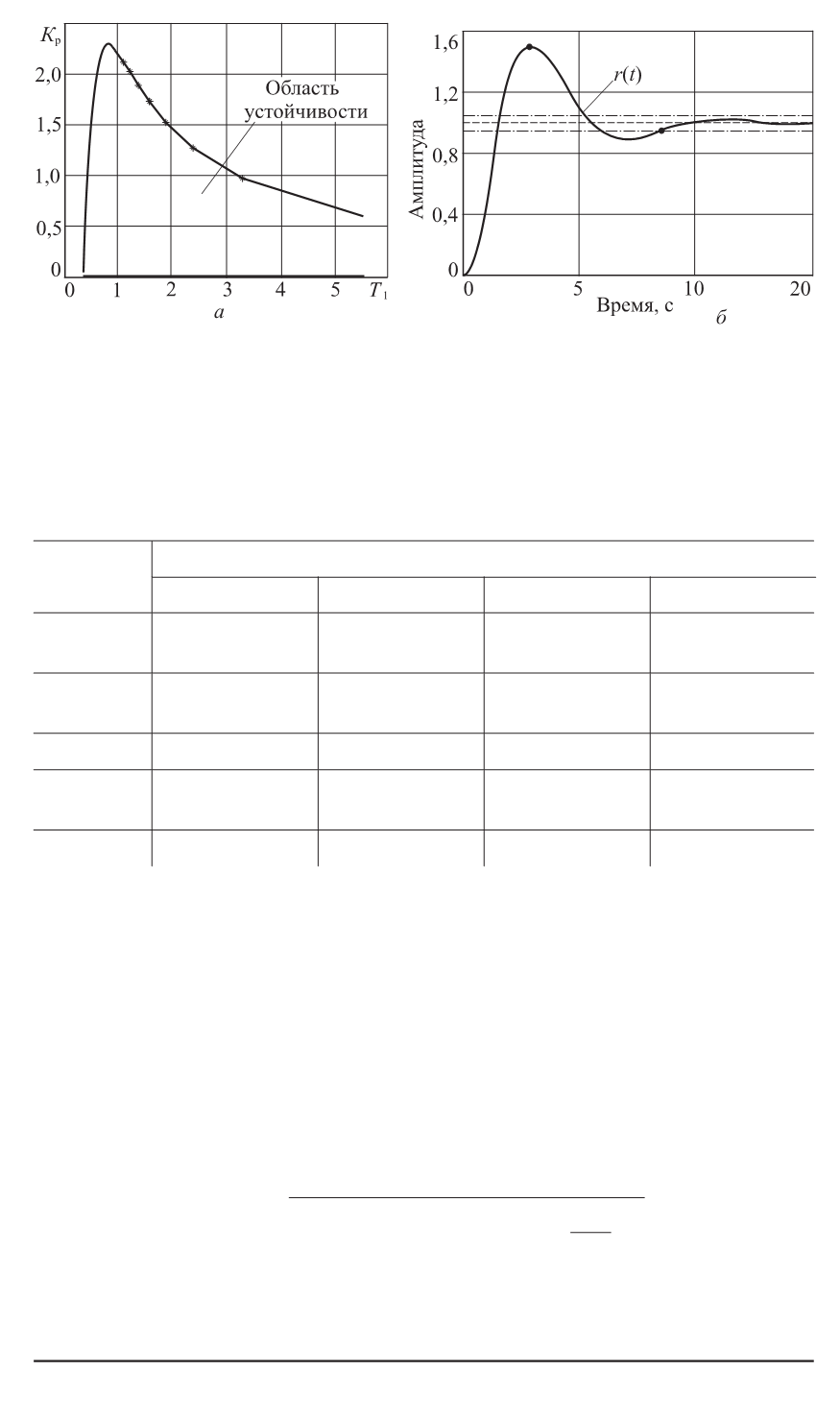
Рис. 3. Графическое представление области устойчивости (
а
) и переходного про-
цесса системы (п. 2, см. табл. 1) при
T
1
= 0
,
15
c;
K
p
= 0
,
5
c
−
1
и
τ
d
= 0
,
0427
c (
б
)
Область устойчивости такой системы показана на рис. 3,
а
, макси-
мально допустимые величины запаздывания
τ
d
приведены в табл. 3.
Таблица 3
Параметры
τ
d
, c
−
1
K
p
= 0
,
5
K
p
= 0
,
75
K
p
= 1
,
0
K
p
= 2
,
0
T
1
= 0
,
5
с Нет запаса
устойчивости
Нет запаса
устойчивости
Нет запаса
устойчивости
Неустойчивая
система
T
1
= 0
,
75
с
То же
То же
То же
Нет запаса
устойчивости
T
1
= 1
,
0
с
–//–
–//–
–//–
То же
T
1
= 1
,
25
с
–//–
–//–
–//–
Неустойчивая
система
T
1
= 1
,
50
с
0,0427
0,0067
–//–
То же
Из данных табл. 3 видно, что только при весьма малых величи-
нах запаздывания можно обеспечить устойчивую работу системы. Это
свидетельствует о большой сложности динамики объекта управления.
Реакция данной системы при
T
1
= 0
,
15
с;
K
р
= 0
,
5
с
−
1
и
τ
d
=
= 0
,
0427
с приведена на рис. 3,
б
.
При управлении самолетом с помощью элеронов и путем измене-
ния силы тяги (п. 3, см. табл. 1) передаточная функция разомкнутой
системы будет иметь следующий вид:
W
(
s
) =
K
П
e
−
τs
(
T
1
s
+ 1)
K
ЛА
(
T
2
2
s
2
+ 2
ξ
2
T
2
s
+ 1)
s
+
1
T
ЛА
s
.
(7)
Область устойчивости для данной системы показана на рис. 4,
а
.
Значения чистого запаздывания
τ
d
, при которых обеспечивается запас
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2006. № 1 121


