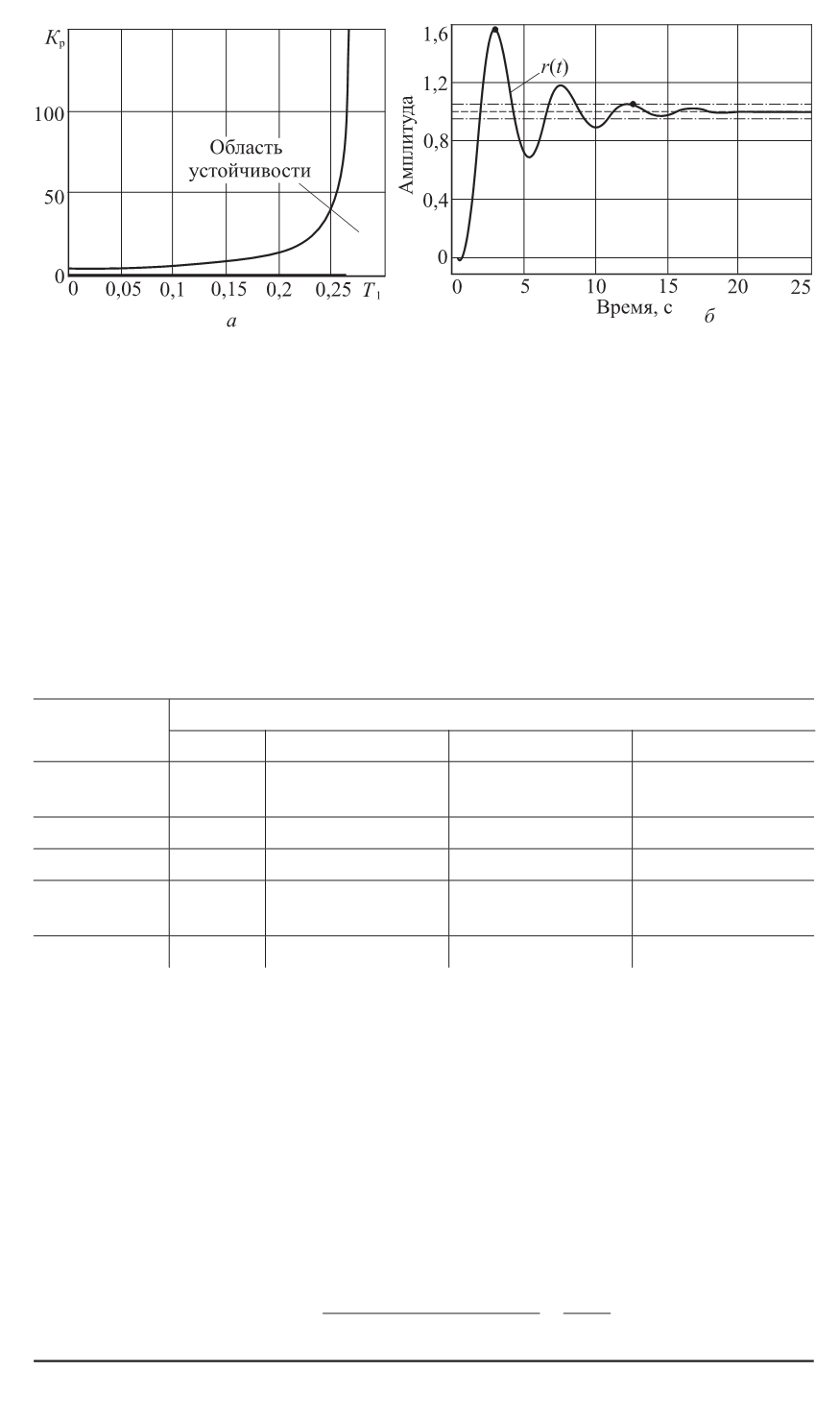
Рис. 2. Графическое представление области устойчивости технической систе-
мы (п. 1, см. табл. 1) (
а
) и переходного процесса для
T
1
= 0
,
15
с,
K
р
= 1
,
0
с
−
1
и
τ
d
= 0
,
7367
с (
б
)
Графическое представление этой области для данного случая при-
ведено на рис. 2,
а
, в табл. 2 приведены значения
τ
=
τ
d
. Переходный
процесс, как реакция замкнутой системы на единичное воздействие
g
(
t
) = 1
, приведен на рис. 2,
б
для значений
T
1
= 0
,
15
с;
K
р
= 1
,
0
с
−
1
и
τ
d
= 0
,
7367
с. Переходный процесс здесь и далее определяли, осно-
вываясь на частотном методе, используя пакет Matlab.
Таблица 2
Параметры
τ
d
, c
−
1
K
p
= 1
K
p
= 5
K
p
= 10
K
p
= 20
T
1
= 0
,
10
с 0,6964
Нет запаса
устойчивости
Неустойчивая
система
Неустойчивая
система
T
1
= 0
,
15
с 0,7367
То же
То же
То же
T
1
= 0
,
20
с 0,7746
–//–
–//–
–//–
T
1
= 0
,
25
с 8,8101
–//–
–//–
Нет запаса
устойчивости
T
1
= 0
,
30
с 0,8371
–//–
–//–
То же
Таким образом, для рассматриваемого объекта управления можно
определить желаемые значения передаточной функции, при которых
обеспечивается устойчивость системы.
Желаемый вид переходного процесса как реакции на единичное
воздействие можно получить, варьируя параметры
Т
1
,
τ
d
и
K
р
, оста-
ваясь в области устойчивости системы.
При управлении космическим аппаратом передаточная функция ра-
зомкнутой системы будет иметь вид
W
(
s
) =
K
П
e
−
sτ
(
T
1
s
+ 1)
(
T
2
2
s
2
+ 2
ξ
2
T
2
s
+ 1)
·
K
ЛА
s
2
.
(6)
120 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2006. № 1


