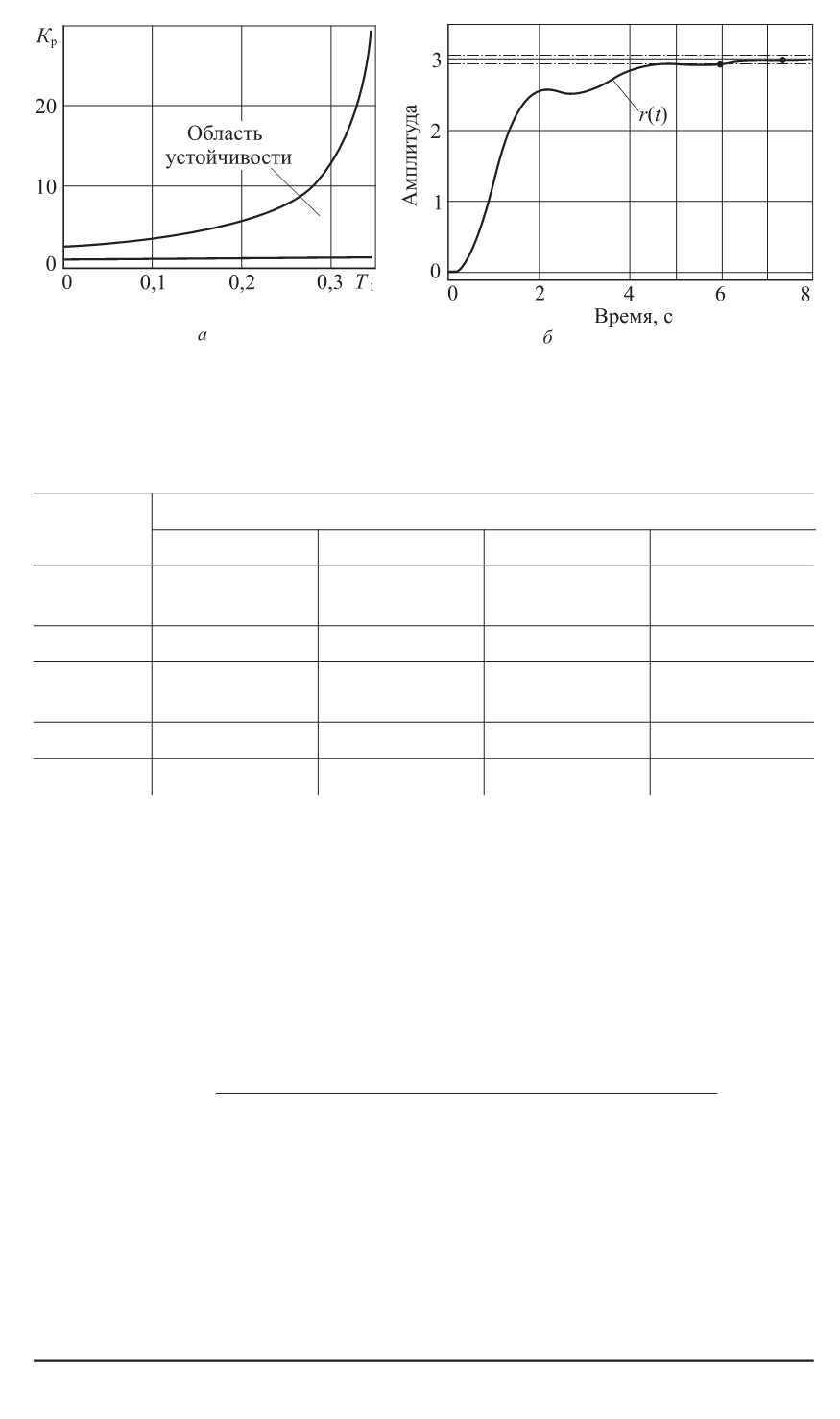
Рис. 5. Графическое представление области устойчивости (
а
) и переходного про-
цесса системы (п. 4, см. табл. 1) при
T
1
= 0
,
3
с,
K
р
= 1
,
5
с
−
1
и
τ
d
= 0
,
1526
с
Таблица 5
Параметры
τ
d
, c
−
1
K
p
= 1
,
5
K
p
= 2
,
0
K
p
= 3
,
0
K
p
= 5
,
0
T
1
= 0
,
1
c Нет запаса
устойчивости
Нет запаса
устойчивости
Нет запаса
устойчивости
Неустойчивая
система
T
1
= 0
,
15
с
0,0157
То же
То же
То же
T
1
= 0
,
20
c
0,0642
0,0088
–//–
Нет запаса
устойчивости
T
1
= 0
,
30
с
0,1526
0,0595
–//–
То же
T
1
= 0
,
35
с
0,1892
0,0706
–//–
–//–
Реакция замкнутой системы на единичное воздействие графиче-
ски показана на рис. 5,
б
для параметров
Т
1
= 0
,
3
с;
K
р
= 1
,
5
с
−
1
и
τ
d
= 0
,
1526
с.
Для объекта управления 5 (см. табл. 1) передаточная функция ра-
зомкнутой системы будет иметь вид
W
(
s
) =
Ke
−
τs
(
T
1
s
+ 1)(
K
ЛА
(
T
ЛА
s
+ 1))
(
T
2
2
s
2
+ 2
ξ
2
T
2
s
+ 1)(
T
2
ЛА2
s
2
+ 2
ξ
ЛА2
T
ЛА2
s
+ 1)
,
(9)
Область устойчивости для этой системы приведена на рис. 6,
а
, до-
пустимые значения запаздывания
τ
d
приведены в табл. 6. Видно, что
значения запаздывания могут изменяться в достаточно широком диа-
пазоне. Переходный процесс такой системы для
Т
1
= 0
,
1
с;
K
р
= 5
с
−
1
и
τ
d
= 0
,
0141
с приведен на рис. 6,
б
.
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2006. № 1 123


