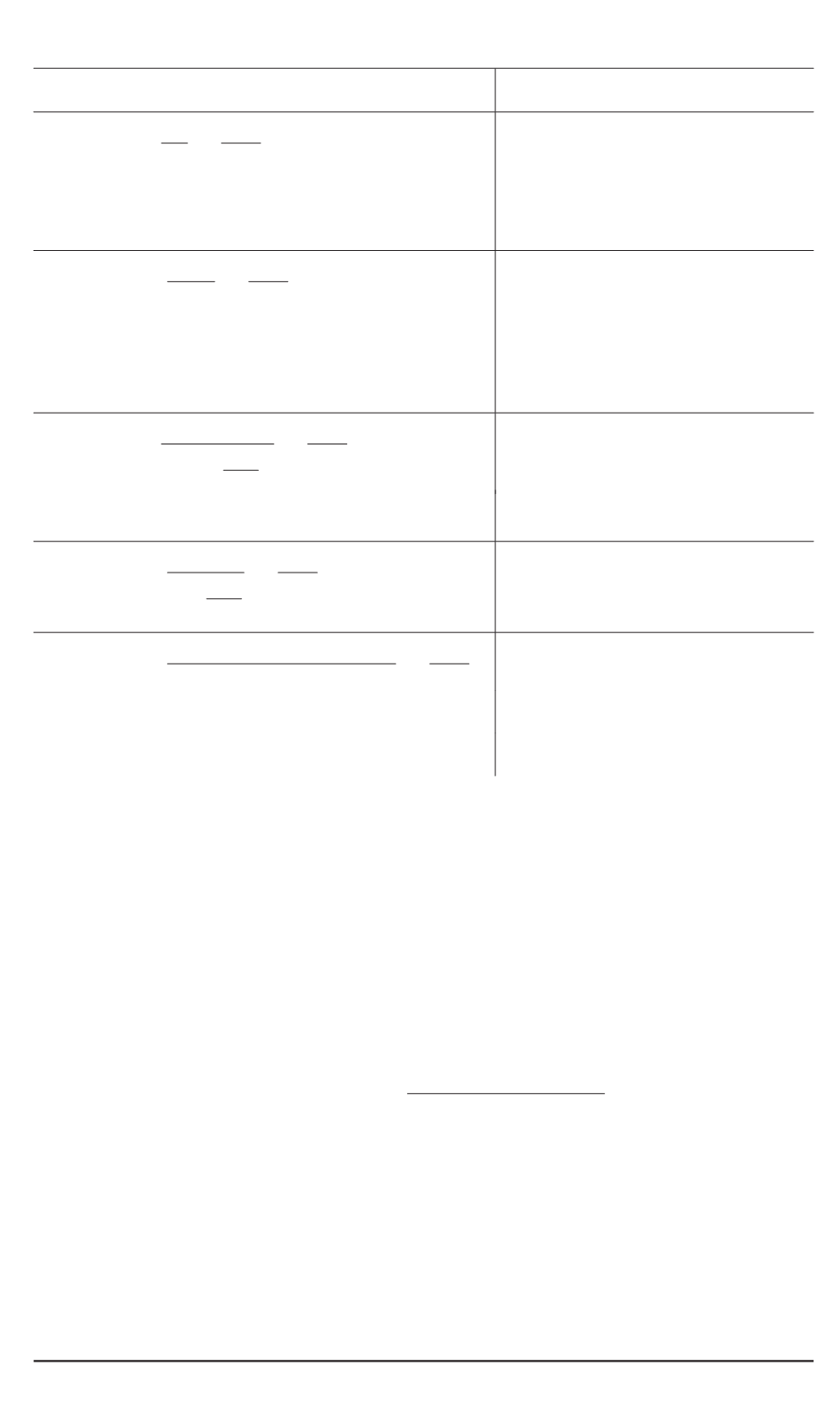
Таблица 1
Передаточная функция
Задачи управления
1.
W
о.у
(
s
) =
K
c
s
=
r
(
s
)
u
(
s
)
;
K
c
=
К
ЛА
= 23
,
0
Управление углом подъема са-
молета при помощи руля вы-
соты; управление направлением
движения автомобиля при малых
углах поворота рулевого колеса.
2.
W
о
.
у
(
s
) =
K
ЛА
s
2
=
r
(
s
)
u
(
s
)
;
K
ЛА
= 23
,
0
Управление пространственным
положением космического кораб-
ля с помощью управляющих ре-
активных двигателей; управле-
ние ракетой-носителем путем из-
менения силы тяги.
3.
W
о.у
(
s
) =
K
ЛА
s s
+
1
T
ЛА
=
r
(
s
)
u
(
s
)
;
К
ЛА
= 23
;
Т
ЛА
= 1
Управление углом крена самоле-
та с помощью элеронов; управле-
ние самолетом с вертикальным
взлетом (в режиме зависания) пу-
тем изменения силы тяги.
4.
W
о
.
у
(
s
) =
1
s
−
1
T
ЛА
=
r
(
s
)
u
(
s
)
;
T
ЛА
= 1
Управление углом атаки статиче-
ски неустойчивого самолета с по-
мощью руля высоты.
5.
W
о
.
у
(
s
) =
K
ЛА
(
T
ЛА
s
+ 1)
T
2
ЛА2
s
2
+ 2
ξ
ЛА2
T
ЛА2
s
+ 1
=
r
(
s
)
u
(
s
)
;
T
ЛА1
= 0
,
17
c,
K
ЛА2
= 23
;
T
ЛА2
= 0
,
05
c,
ξ
ЛА2
= 0
,
4
Управление угловой скоростью
тангажа самолета
В качестве исходных данных для исследования устойчивости си-
стем человек–машина будем использовать следующие значения, от-
ражающие реальные свойства технических систем, приведенных в
табл. 1, а именно:
K
ЛА
=
K
c
= 23
,
0;
T
ЛА
= 1
c
;
T
ЛА
1
= 0
,
17
c
;
T
ЛА
2
= 0
,
05
c
;
ξ
ЛА
2
= 0
,
4
.
Запишем передаточную функцию [2]
W
ч
.
о
.
=
K
П
e
−
τs
T
1
s
+ 1
T
2
2
s
2
+ 2
ξ
2
T
2
s
+ 1
,
(1)
где
K
П
= 0
,
30
,
τ
= 0
,
19
c;
T
1
= 0
,
28
c;
T
2
= 0
,
33
c;
ξ
2
= 0
,
6
являются
средними значениями нескольких параметров.
Цель исследования состоит в определении допустимых значе-
ний передаточной функции человека-оператора, при которых система
человек–машина устойчива и удовлетворяет заданным требованиям
по качеству работы.
118 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2006. № 1


