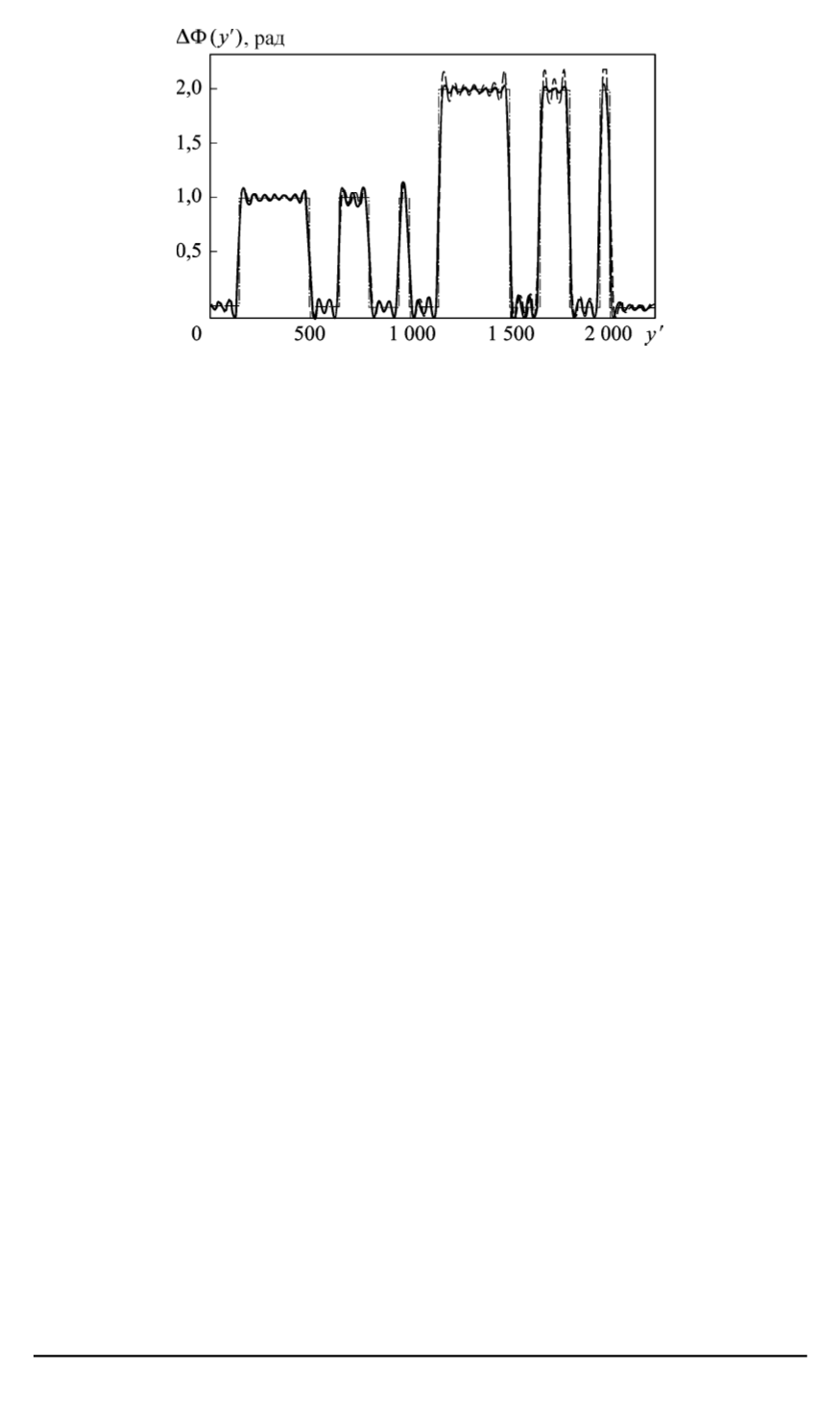
Рис. 5. Зависимость смещения по фазе от координаты:
—
∙
—
∙
— исходное распределение
ΔΦ(
y
0
)
; – – – — расчетное распределение
Δ ˆΦ
теор
(
y
0
)
;
———— — восстановленное распределение
Δ ˆΦ(
y
0
)
Как следует из рис. 5 при небольших амплитудах
A
Φ
= 1
рад мак-
симальное отклонение восстановленного рельефа
ˆΦ(
y
)
поверхности
от расчетного
ˆΦ
теор
(
y
0
)
не превышает 5%, т.е. при выполнении усло-
вия (12) формулы (16) и (17) достаточно точно описывают восстано-
вленный рельеф поверхности объекта. При увеличении амплитуды до
A
Φ
= 2
рад отличие возрастает до 15%.
Если предположить, что калибровка системы выполнена с доста-
точной степенью точности, то погрешность восстановления формы
объекта может быть обусловлена следующими факторами:
— линейными и нелинейными искажениями, возникающими в про-
цессе обработки зарегистрированного сигнала;
— текстурой объекта, зависящей от пространственного распреде-
ления коэффициента отражения
ρ
(
y
)
;
— аддитивным шумом регистрирующей камеры [5].
На основе теоретических и экспериментальных исследований обо-
снована возможность использования гармонических тест-объектов для
контроля погрешности трехмерного сканера. Представленные в статье
результаты могут быть использованы для оптимизации конструктив-
ных параметров прибора и параметров алгоритма при минимизации
погрешности восстановления формы объекта с учетом его простран-
ственной структуры.
ЛИТЕРАТУРА
1.
Шапиро Л.
,
Стокман Дж.
Компьютерное зрение. М: БИНОМ. Лаборатория
знаний, 2006.
2.
Trobina M.
Error model of a coded-light range sensor: Technical report BIWI-TR-
164, ETH-Zentrum, 1995.
88 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2013. № 2


