областью притяжения к положению равновесия. Кроме того, подвес
должен удерживать ротор, находящийся под действием возмущающих
сил, с заданной точностью. Таким образом, следует обеспечить устой-
чивость системы стабилизации как при малых, так и при больших
возмущениях положения ротора. При оптимизации параметров кор-
ректирующего устройства нужно правильно выбрать критерий опти-
мальности. Для подвесов важна точность удержания ротора вблизи
положения равновесия. В каких же случаях возможно появление от-
клонения ротора от центра подвеса?
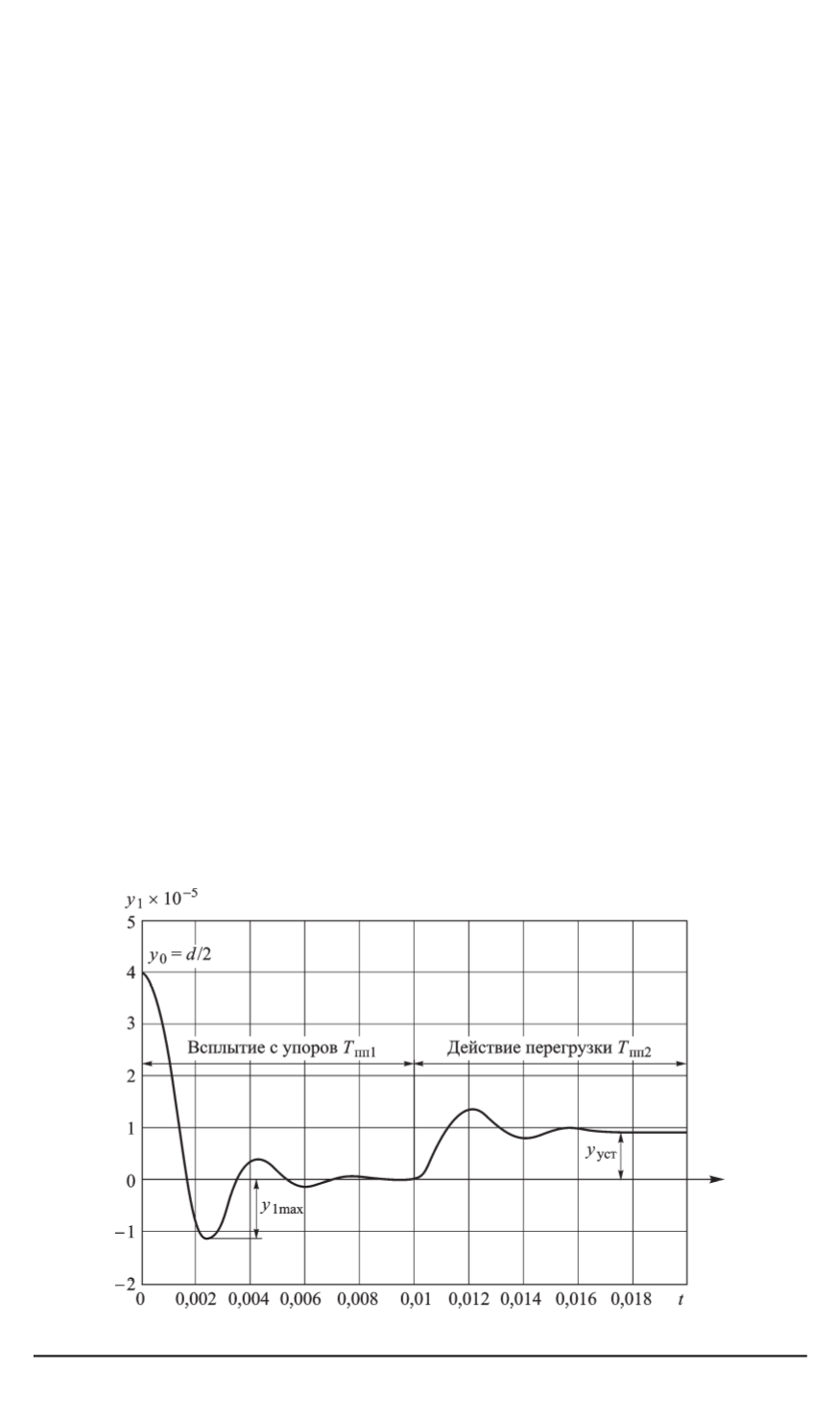
Во-первых, это происходит при первоначальном всплытии ротора
с упоров. В процессе всплытия координата центра изменяется по не-
которому закону
y
1
(
t
)
,
0
t
∞
. Практически переходный процесс
заканчивается за некоторое конечное время
T
пп1
, и критерием опти-
мальности в данном случае может служить минимум функционала
I
1
=
T
пп1
0
y
2
1
(
t
)
dt.
Bажно, чтобы процесс всплытия (рис. 3) был или монотонным, или
слабо колебательным. В дальнейшем при синтезе параметров регуля-
тора ограничим максимальное отклонение при всплытии величиной
y
1max
= 0
,
2
y
0
.
Во-вторых, отклонение ротора от центра подвеса возникает при
действии перегрузок. Будем считать, что перегрузка
n
max
носит сту-
пенчатый характер и приводит к переходному процессу
y
2
(
t
)
с вре-
менем практического окончания
T
пп2
(см. рис. 3), а за критерий опти-
Рис. 3. Графики, иллюстрирующие процесс всплытия ротора гироскопа
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2008. № 3 121


