Подставляя соотношения (10) в выражения (4) и (5), находим до-
полнительные коэффициенты усиления по осям
y
и
z
:
k
у
y
=
k
у
z
−
F
в
y
max
k
зап
+
D
¯
y
ст
max
k
д
A
¯
y
ст
max
.
(11)
Коэффициент усиления по оси
x
выбирается из условия равно-
жесткости подвеса, т.е. при одинаковых возмущающих воздействиях
по всем осям статические провисы должны быть одинаковыми. Тогда,
учитывая выражение (4), находим
k
у
x
=
k
у
y
2
+
D
−
B
2
Ak
д
.
(12)
После определения дополнительных коэффициентов усиления
сформируем линейную одномерную модель подвеса. Для этого за-
пишем уравнения движения ротора в подвесе на постоянном токе,
используя соотношения (1) и (2) следующим образом:
⎧⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎩
¨
x
−
˜
b
1
x
= 2 ˜
d
1
Δ
ϕ
1
+
f
в
x
;
¨
y
−
˜
b
2
y
= ˜
d
1
Δ
ϕ
2
+
f
в
y
;
¨
z
−
˜
b
2
z
= ˜
d
1
Δ
ϕ
5
+
f
в
z
;
˜
b
1
=
B
mh
; ˜
b
2
=
D
mh
; ˜
d
1
=
A
m
;
f
в
x
=
F
в
x
m
;
f
в
y
=
F
в
y
m
;
f
в
z
=
F
в
z
m
.
(13)
В трехосном подвесе существует возможность непосредственного
получения сигналов, пропорциональных смещениям по осям
x
,
y
,
z
,
кроме того, линеаризованные силовые функции (3) не содержат пере-
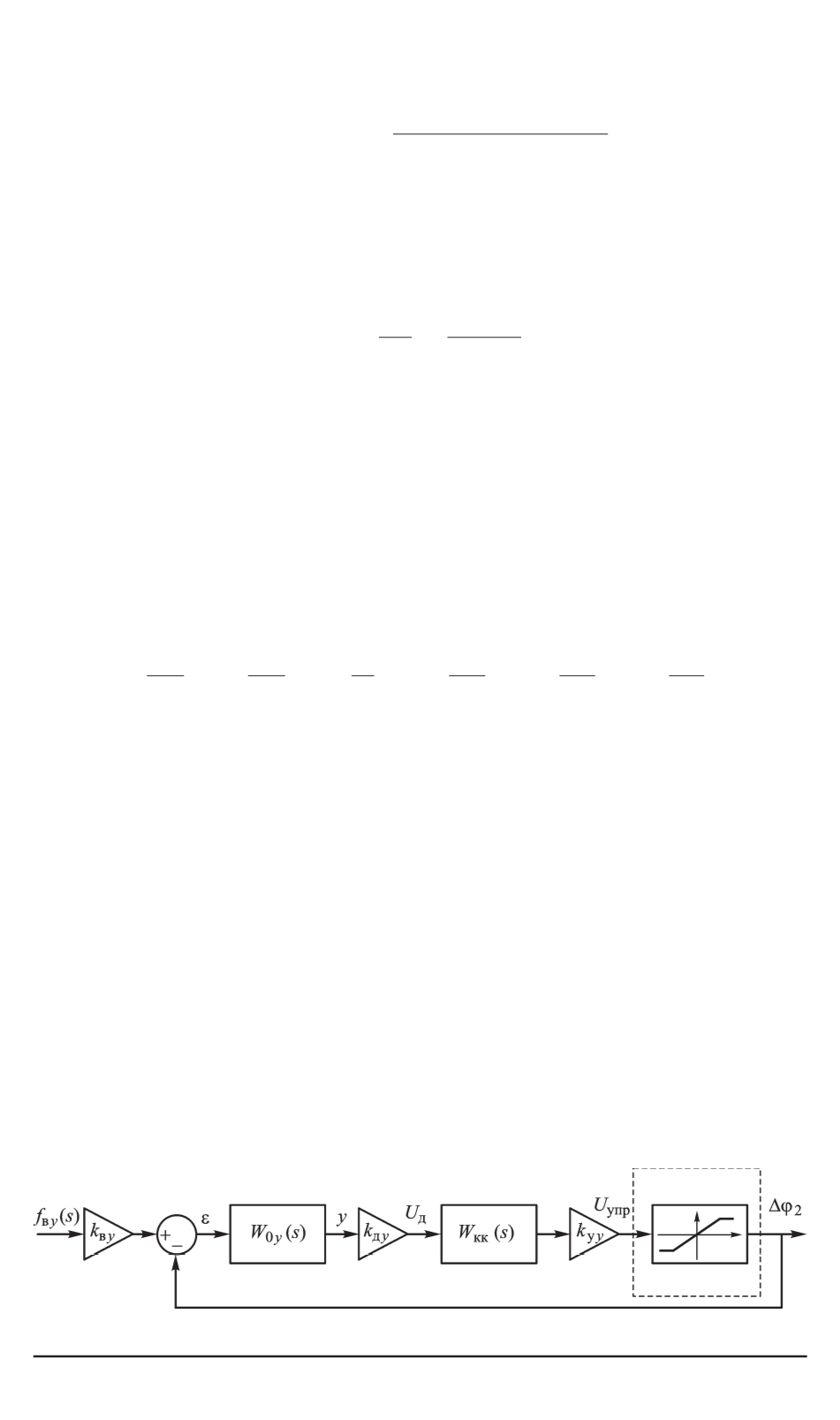
крестных связей. Все это позволяет осуществлять независимое, пока-
нальное регулирование положения ротора. Структурная схема одного
канала стабилизации (например, по оси
y
) приведена на рис. 2.
Основным назначением контура стабилизации является автомати-
ческое сведение к нулю (с точностью до статической ошибки) рассо-
гласования между текущей координатой центра ротора
y
и точ кой
y
∗
,
которой сопоставим несмещенное положение. В большинстве случаев
y
∗
= 0
, т.е. стабилизация осуществляется вокруг геометрического цен-
тра подвеса. Кроме того, контур стабилизации должен отрабатывать
воздействие внешних возмущающих сил
f
в
y
, также сводя к нулю их
воздействие на текущую координату
y
центра ротора.
Рис. 2. Структурная схема канала стабилизации
118 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2008. № 3


