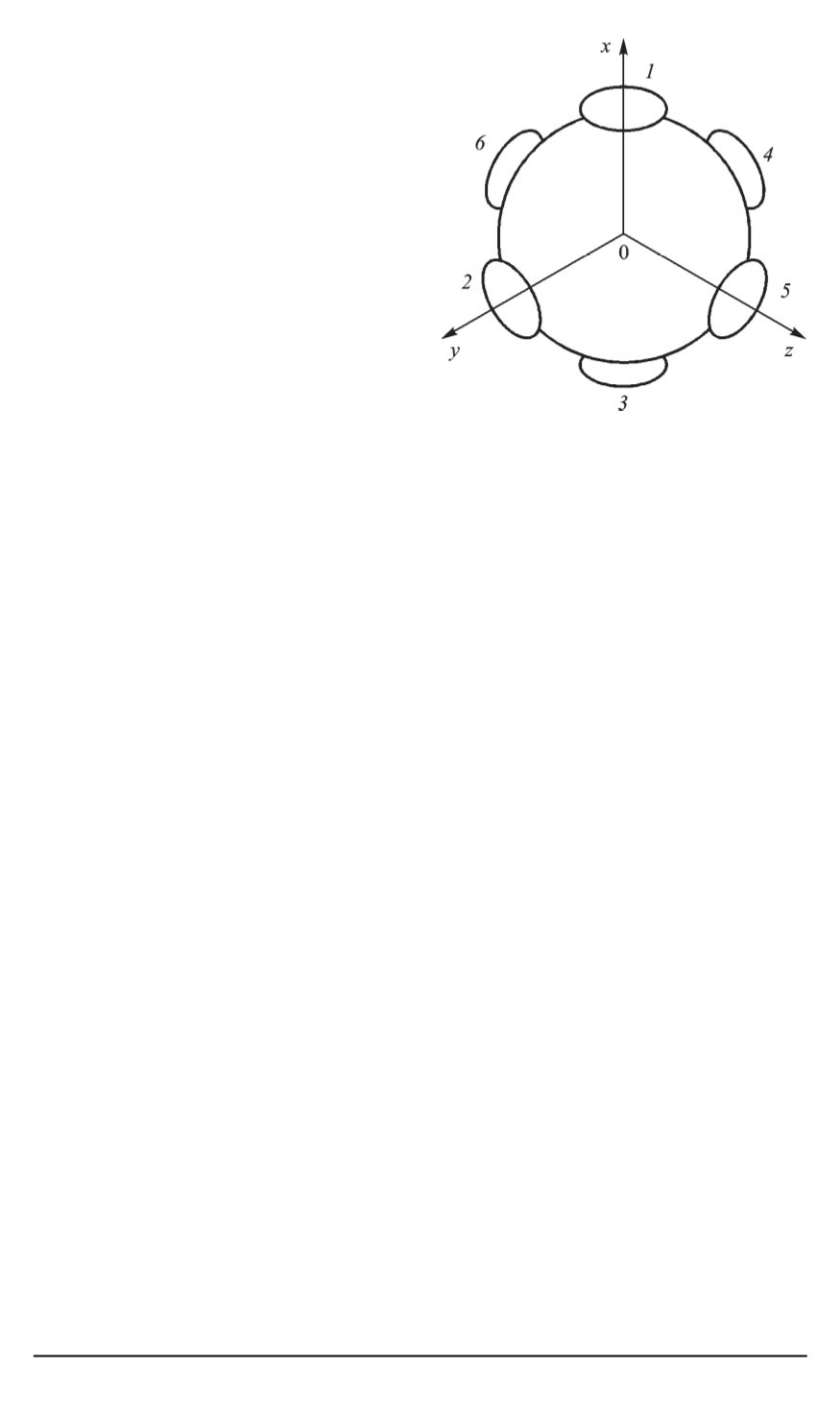
Рис. 1. Система координат электро-
статического подвеса
учесть следующие сведения. При-
нято различать типы ЭСГ по точ-
ности, причислив к приборам вы-
сокой точности конструкции с по-
лыми роторами больших диаме-
тров (40. . . 60 мм) и средней точ -
ности со сплошными роторами ма-
лых диаметров (10. . . 20 мм). При
этом в силу ряда причин был уста-
новлен размер рабочего зазора в ка-
мере в диапазоне 50. . . 150 мкм и
5. . . 20 мкм соответственно.
Если сферический ротор и дру-
гие элементы конструкции изгото-
влены в соответствии с требовани-
ями, предъявляемыми к приборам данного класса, то зависимость цен-
трирующих сил от параметров вращательного движения достаточно
мала. Это позволяет утверждать, что исследование уравнений посту-
пательного движения возможно независимо от вращательного.
В неподвижной системе координат
0
xyz
(рис. 1), связанной с ка-
мерой, взвешенное тело совершает поступательное движение, которое
описывается системой уравнений
⎧⎪⎨
⎪⎩
m
¨
x
=
F
x
+
F
в
x
;
m
¨
y
=
F
y
+
F
в
y
;
m
¨
z
=
F
z
+
F
в
z
.
(1)
Здесь
F
x
, F
y
, F
z
— соответствующие проекции пондеромоторных сил,
развиваемых подвесом, а
F
в
x
, F
в
y
, F
в
z
— проекции возмущений.
Силовые характеристики подвеса зависят от способа регулирова-
ния потенциалов на электродах [2] (подвесы на постоянном токе, пе-
ременном токе, импульсные подвесы) и от конфигурации электродной
системы. В настоящей работе будем рассматривать трехосный подвес
на постоянном токе (см. рис. 1), в котором для минимизации наведен-
ного потенциала ротора положительное опорное напряжение на элек-
тродах оси
x
в 2 раза превышает отрицательные опорные напряжения
на электродах осей
y
и
z
. Управление потенциалами осуществляется
по закону
ϕ
1
= 2
ϕ
0
э
−
Δ
ϕ
1
;
ϕ
3
= 2
ϕ
0
э
+ Δ
ϕ
1
;
ϕ
2
=
−
(
ϕ
0
э
−
Δ
ϕ
2
);
ϕ
4
=
−
(
ϕ
0
э
+ Δ
ϕ
2
);
ϕ
5
=
−
(
ϕ
0
э
−
Δ
ϕ
5
);
ϕ
6
=
−
(
ϕ
0
э
+ Δ
ϕ
5
);
Δ
ϕ
1
=
k
¯
x
; Δ
ϕ
2
=
k
¯
y
; Δ
ϕ
5
=
k
¯
z
;
k
=
k
д
k
у
,
(2)
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2008. № 3 115


