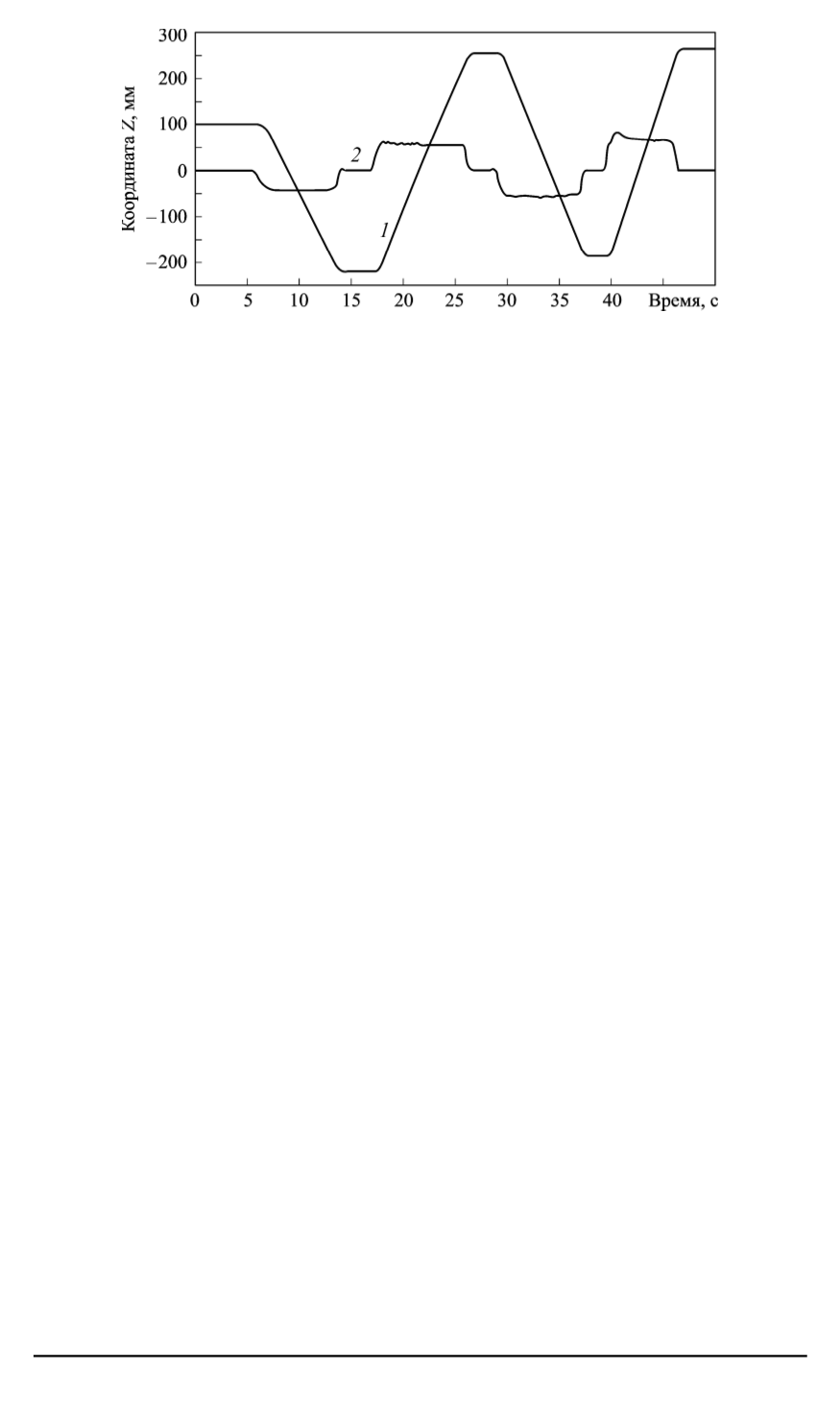
Рис. 5. Траектории движения схватов задающего и исполнительного МР
(“горки”) и силы, регистрируемые СМД задающего (
1
) и исполнительного (
2
)
МР
МР вдоль вертикальной прямой. В этом случае матрицы
W
m
,
W
s
,
k
m
,
k
s
одномерны.
Первый эксперимент проводился, когда обе системы разомкнуты
(т.е. ни на задающей части, ни на исполнительной нет контакта с
оператором или средой). К каждому МР поочередно подвешивался
груз, и система совершала движение в соответствующем направлении.
Графики эксперимента приведены на рис. 5.
На графиках видно, что система устойчива, а ее динамика полно-
стью определяется свойствами задающего и исполнительного МР.
Следующая серия экспериментов демонстрирует работу системы,
когда замыкается система управления исполнительным МР (по сиг-
налам СМД). Для нее входным воздействием являются координаты
объекта манипулирования. В начале эксперимента оба манипулятора
ни с чем не соприкасаются. Затем к задающему манипулятору подве-
шивается груз, создающий постоянную силу. Препятствия на пути пе-
ремещения задающего МР отсутствуют, поэтому система управления
задающего МР остается разомкнутой. Задающий и исполнительный
МР совершают движение до тех пор, пока исполнительный МР не
встретит препятствие. В этом случае либо оба МР останавливаются,
либо в системе возникают автоколебания. Было проведено несколько
экспериментов с различными значениями
k
m
и
k
s
. На рис. 6,
а
при-
ведены графики, полученные по результатам трех экспериментов со
значениями
k
m
=
k
s
= 4
, 1 и 0,4. По графикам можно судить, что
исполнительный контур системы устойчив при
k
m
=
k
s
= 0
,
4
. Экспе-
рименты показали, что это значение является граничным, при б ´ольших
значениях устойчивость теряется.
Третья серия экспериментов соответствует случаю замыкания обо-
их контуров. На пути перемещения задающего МР также было раз-
мещено препятствие. Затем по аналогии с предыдущим случаем была
74 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2013. № 2


