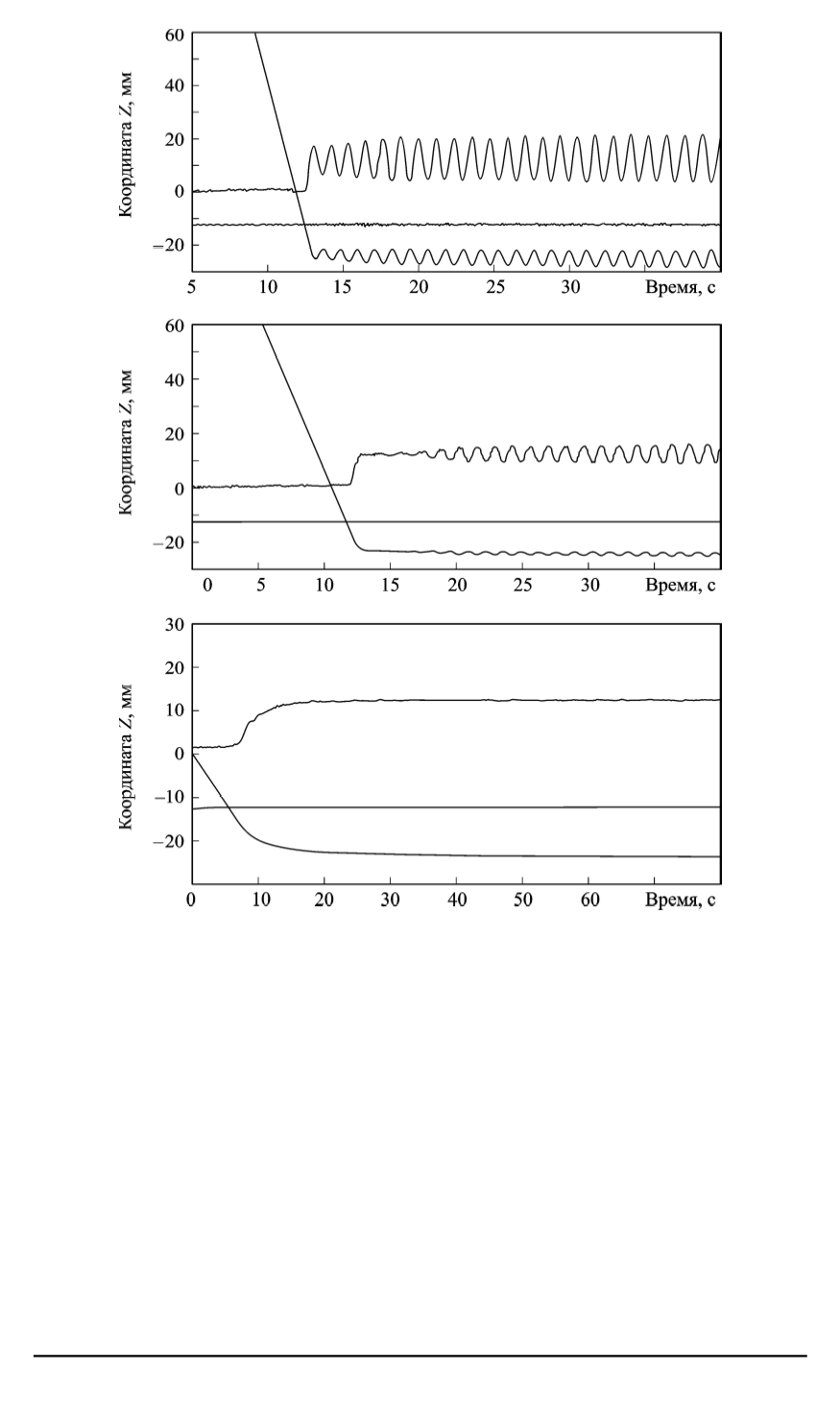
Рис. 6. Изменение координат (верхняя линия) схватов ведущего и ведомого ма-
нипуляторов при контакте с объектом, а также силы, регистрируемые СМД ве-
дущего (средняя линия) и ведомого (нижняя линия) роботов, при
k
m
=
k
s
= 4
,
1 и 0,4
приложена сила, приводящая систему в движение. Роботы движутся
до тех пор, пока не встретятся с препятствиями. Устойчивость си-
стемы в этом случае обеспечивается при значениях коэффициентов
усиления, вдвое меньших, чем в предыдущем случае.
На рис. 7 приведены результаты трех экспериментов при
k
m
=
k
s
=
= 2
, 0,5 и 0,2, подтверждающие высказанное ранее предположение
о необходимости снижения в 2 раза коэффициентов усиления. При
k
m
=
k
s
= 2
и 0,5 система неустойчива и входит в автоколебания, при
k
m
=
k
s
= 0
,
2
процесс устойчив.
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2013. № 2 75


