x
s
=
W
s
(
s
)
F
s
.
Матричные передаточные функции
W
m
и
W
s
имеют вид:
W
m
(
s
) =
k
m
/s
;
W
s
(
s
) =
k
s
/s,
где
k
m
,
k
s
— матрицы коэффициентов.
Таким образом, заданные линейные и угловые скорости схватов
МР пропорциональны действующим на задающий и исполнительный
МР силам и моментам.
В экспериментах рассматривалась работа системы при управлении
только по одной декартовой координате, соответствующей движению
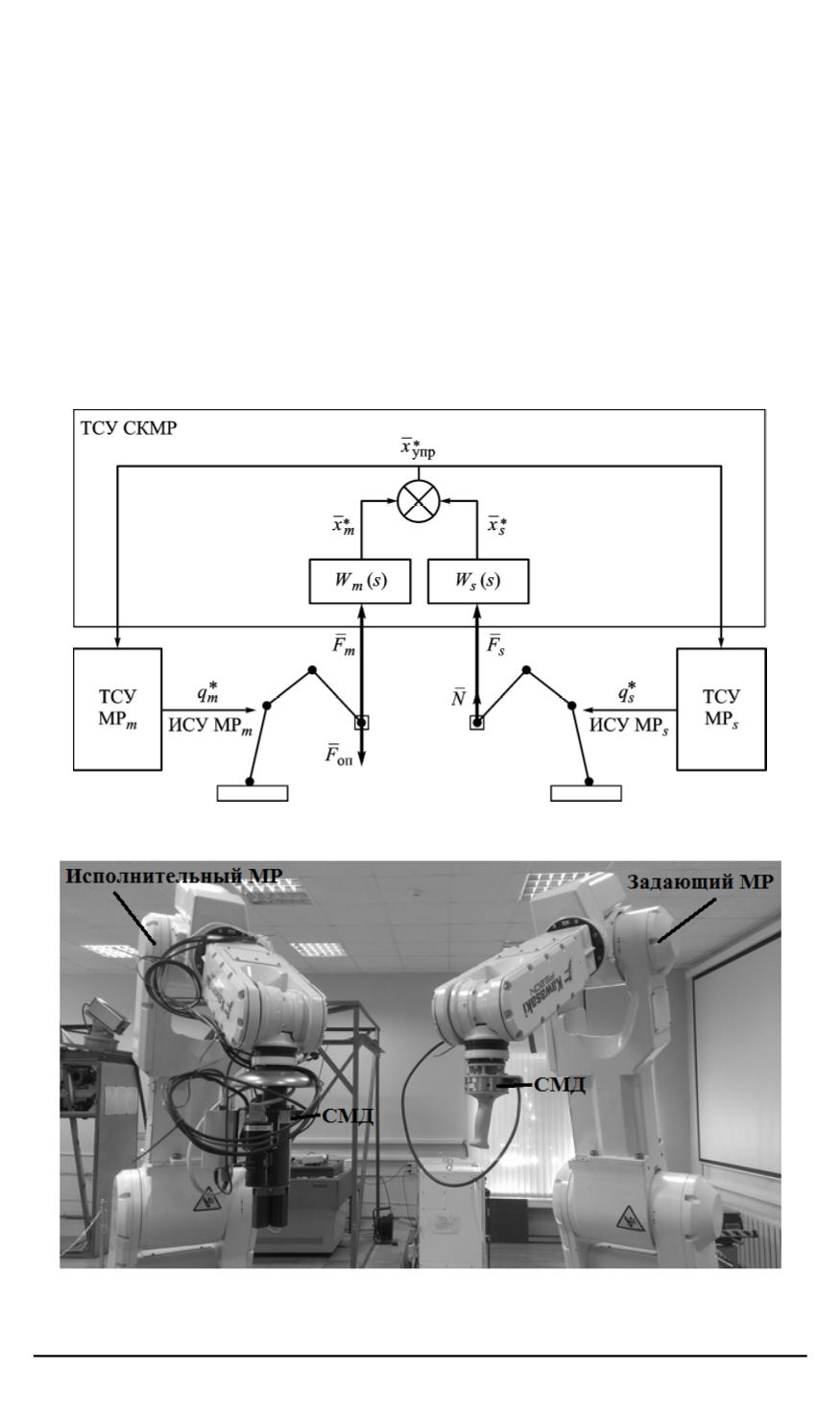
Рис. 3. Структурная схема системы ДСД
Рис. 4. Внешний вид экспериментального стенда
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2013. № 2 73


