и моментов (СМД). Один из МР используется как ЗУ (задающий МР), а
другой — как ИУ (исполнительный МР). Оператор управляет системой,
воздействуя на схват задающего МР. Сигналы датчиков используются
в системе управления для формирования управляющих воздействий на
ЗУ и ИУ таким образом, что обеспечивается двусторонняя передача
сил и моментов.
Законы формирования управляющих воздействий могут быть раз-
личными [4]. В данном случае рассматривается структура, в которой
сигналы СМД ЗУ и ИУ подвергаются интегрированию, что соответ-
ствует реализации скоростного алгоритма управления на исполнитель-
ной и задающей сторонах. Для реализации такого алгоритма должны
быть доступны сравнительно большие объемы рабочей зоны на обеих
сторонах. Достоинством алгоритма является обеспечение кинемати-
ческого подобия перемещений задающего и исполнительного МР. Это
делает управление МР достаточно удобным и контролируемым даже
в случае потери зрительного контакта оператора с исполнительным
МР. Последнее особенно важно при дистанционном управлении, когда
имеет место значительное запаздывание сигналов в каналах передачи
информации.
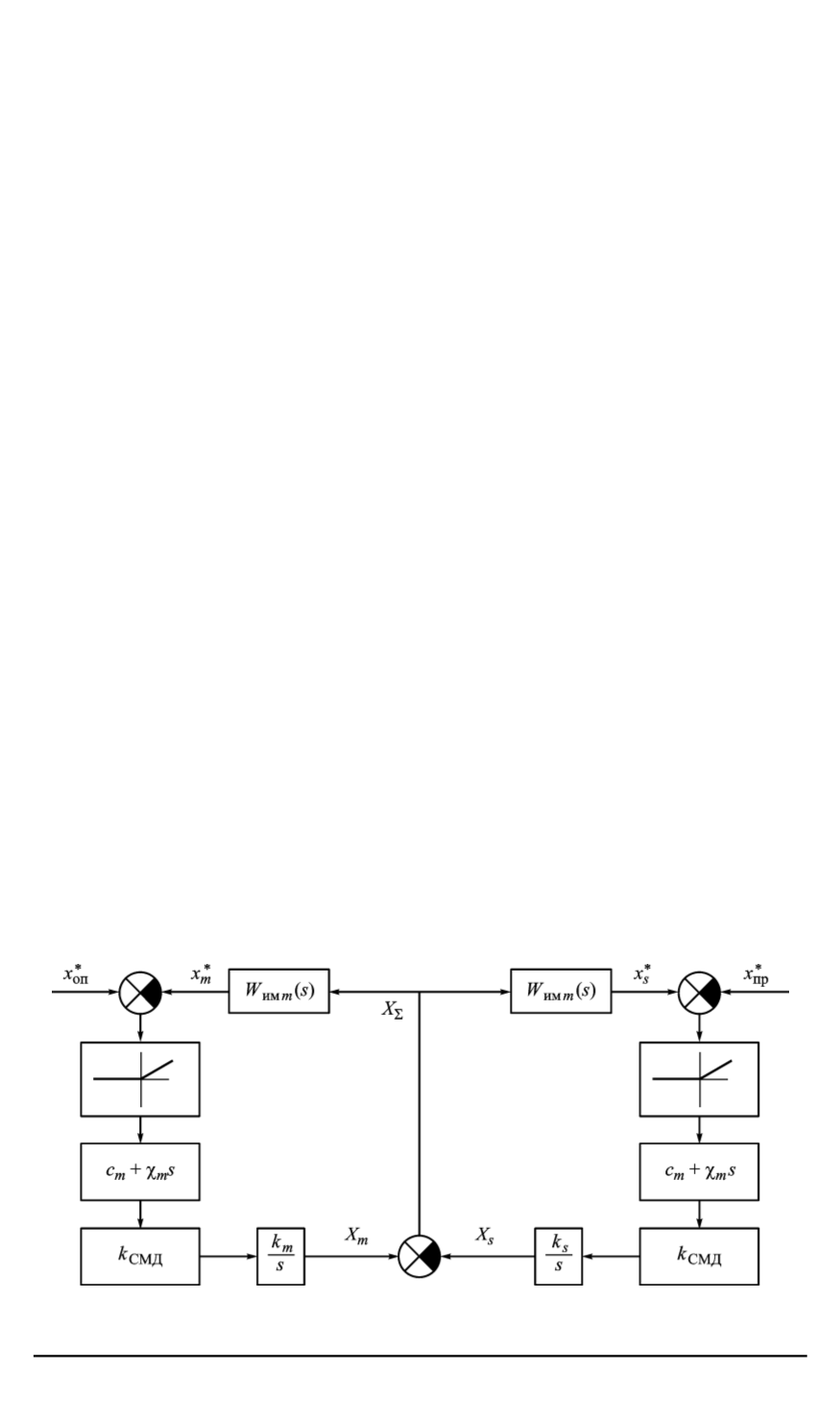
Структурная схема рассматриваемой системы приведена на рис. 2,
на котором обозначено:
x
оп
,
x
пр
— декартовы координаты (положение
в пространстве) руки оператора и объекта манипулирования;
x
m
,
x
s
— текущие декартовы координаты схватов задающего и исполнитель-
ного роботов;
W
им
m
(
s
)
,
W
им
s
(
s
)
— матричные передаточные функции
задающего и исполнительного МР;
c
m
,
c
s
— матрицы коэффициентов
жесткости руки оператора и объекта;
χ
m
,
χ
s
— матрицы коэффициен-
тов демпфирования руки оператора и объекта;
k
СМД
— матрица коэф-
фициентов передачи одного из СМД (СМД на задающем и исполни-
тельном МР полагаются идентичными);
k
m
,
k
s
— матрицы коэффици-
ентов интегрирования сил и моментов задающего и исполнительного
Рис. 2. Структурная схема системы
68 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2013. № 2


