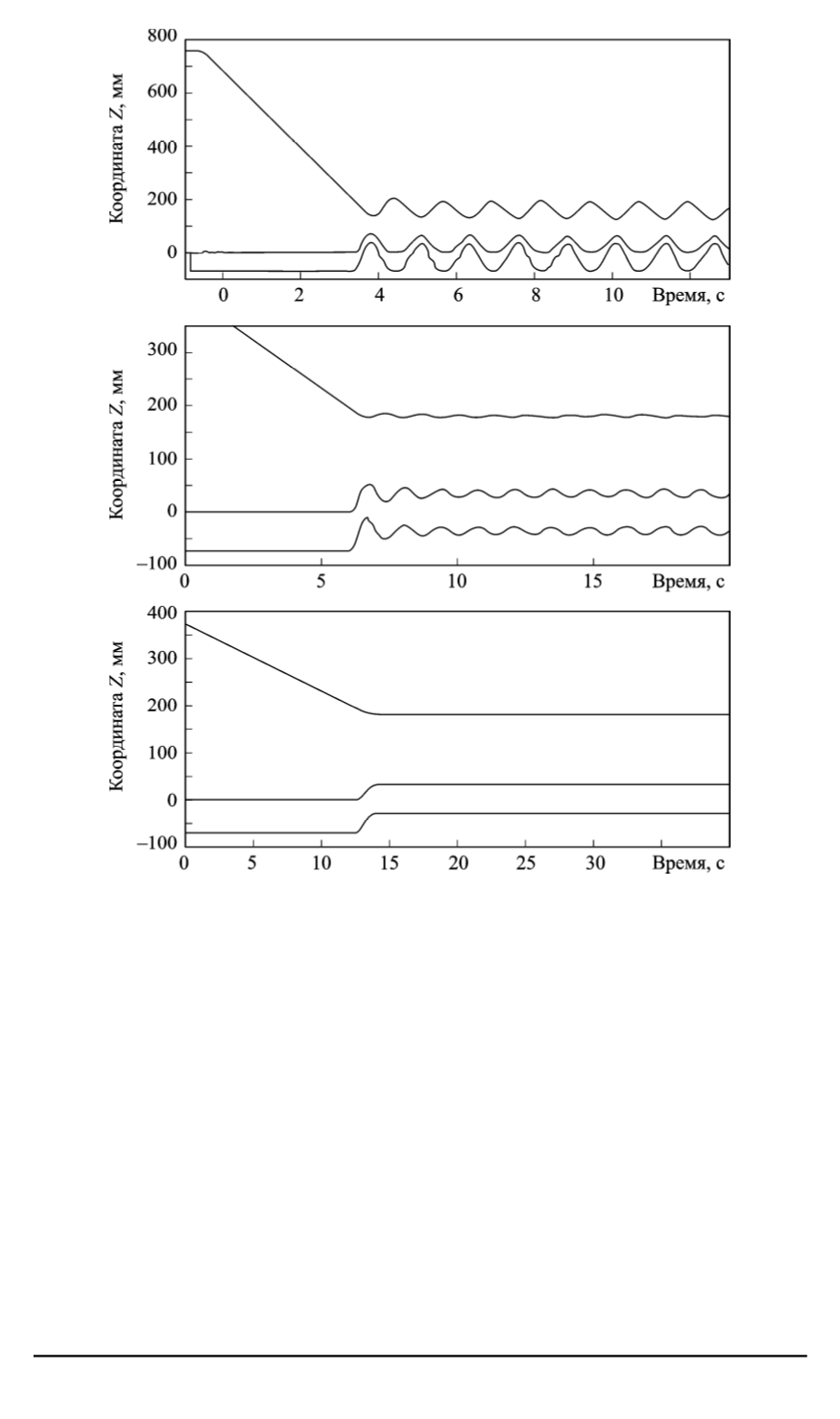
Рис. 7. Изменение координат (верхняя линия) схватов ведущего и ведомого ма-
нипуляторов при контакте с объектом, а также силы, регистрируемые СМД ве-
дущего (средняя линия) и ведомого (нижняя линия) роботов, при
k
m
=
k
s
= 2
;
0,5 и 0,2
В экспериментах задающий и исполнительный МР перемещались в
широком диапазоне. Благодаря кинематическому подобию задающего
и исполнительного МР, оператор мог решать задачи перемещения МР
в заданное положение, даже не наблюдая исполнительного МР.
Тот факт, что показатели устойчивости системы при размыкании
хотя бы одного контура увеличиваются по сравнению с полностью
замкнутой системой целесообразно использовать на практике. Так,
в случае возникновения колебательного процесса оператору следует
высвободить задающий МР (“бросить” задающий МР), что обеспечит
увеличение запасов устойчивости всей системы.
76 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2013. № 2


