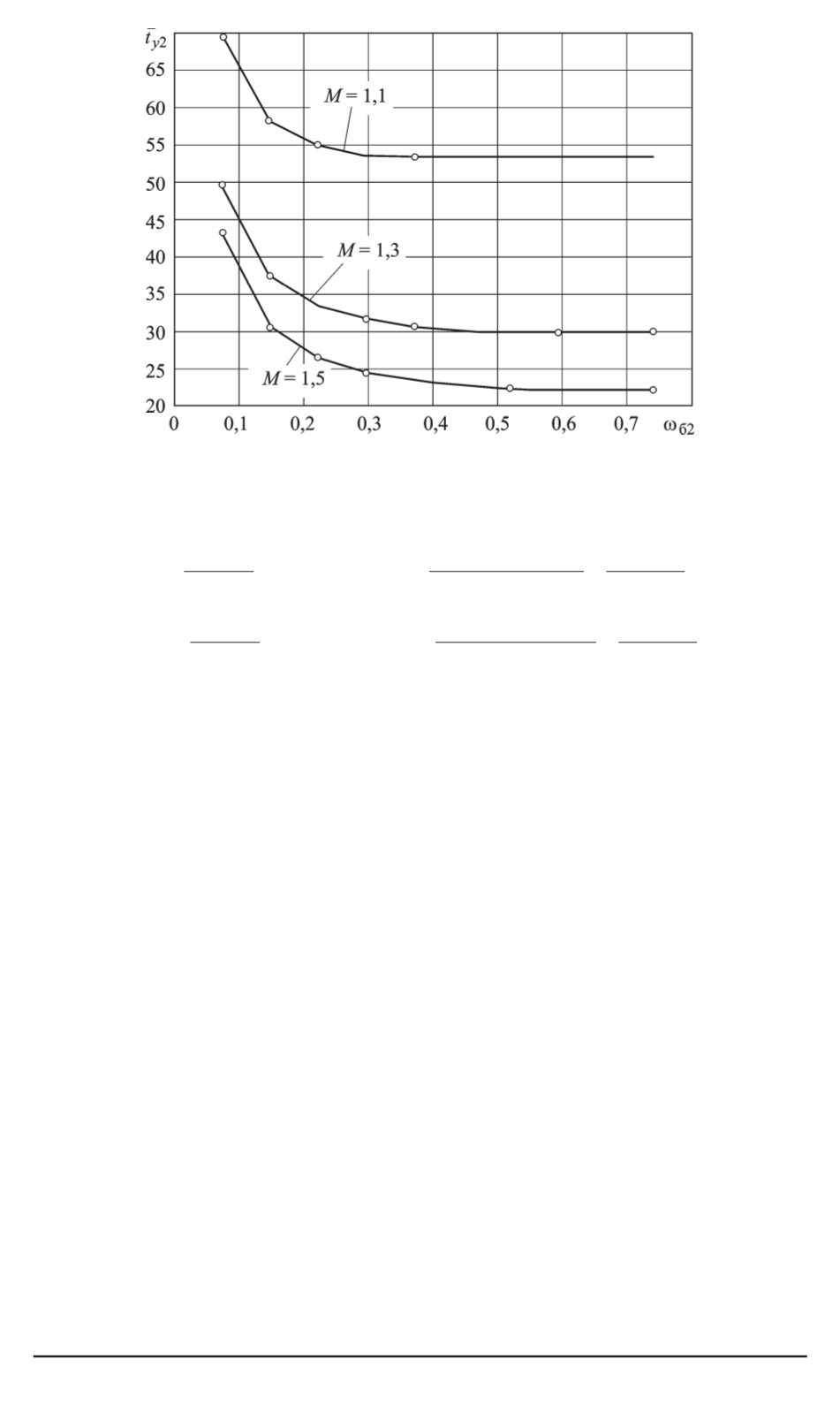
Рис. 5. Зависимость времени ПП
¯
t
У2
¯
t
¯
t
от базовой частоты
¯
ω
Б2
определить из выражений:
t
у
2
f
=
2Δ
f
УГ
N
2
ω
2
б
2
−
2
R
1
C
2
+ ln
Δ
f
ε
N
2
ω
2
б
2
R
1
C
2
b
2
f
1
−
a
2
ω
б
2
t
у
2
fi
=
2Δ
f
УГ
N
2
ω
2
б
2
−
2
R
1
C
2
+ ln
Δ
f i
ε
N
2
ω
2
б
2
R
1
C
2
b
2
fi
1
−
a
2
ω
б
2
⎫⎪⎪⎬
⎪⎭
.
(4)
Для проверки допущений 1, 2 и 3, которые приводят к упрощен-
ным выражениям (4) для определения времени
t
у
2
f
и
t
у
2
fi
, в среде
визуального моделирования SIMULINK системы математических рас-
четов Matlab была разработана модель системы ИФАПЧ третьего по-
рядка для схемы синтезатора, приведенной на рис. 1. Обратимся к
графикам, приведенным на рис. 5, где показаны результаты расчетов
по выражениям (4) для
t
у
2
f
и для
t
у
2
fi
, а звездочками — результ ат ы
моделирования в среде SIMULINK. Параметры исследуемой системы
ИФАПЧ определяли параметрическим синтезом на основе понятия
показателя колебательности
М
[9], дополнительно задавали значения
Δ
f
ГУН
= 450
МГц,
N
2
= 27625
,
Δ
f
ε
= 1
Гц,
b
2
и
a
2
в соответствии с
работой [8] для трех значений
M
= 1,1; 1,3 и 1,5.
На рис. 5 по оси абсцисс задавали значения
¯
ω
б
2
=
ω
б
2
N
2
/
Δ
f
ГУН
(нормированное значение БЧ), по оси ординат— значения
¯
t
у
2
f
=
ω
б
2
t
у
2
f
и
¯
t
у
2
fi
=
ω
б
2
t
у
2
fi
(нормированное время ПП). Из рис. 5 следует, что
результаты расчетов по уравнению (4) и результаты моделирования
очень близки (погрешность менее
1
,
5
%). Кроме того, видно, что при
ω
б
2
N
2
/
Δ
f
ГУН
<
0
,
1
время
t
у
2
f
, t
у
2
fi
увеличивается в 1,5–2 раза по
сравнению с линейным случаем (
ω
б
2
N
2
/
Δ
f
ГУН
>
0
,
5)
.
Считая, что задача определения времени ПП в РС решена (вы-
ражение (3) для
t
3
)
, перейдем к определению
t
у
, учитывая способы
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2008. № 3 59


