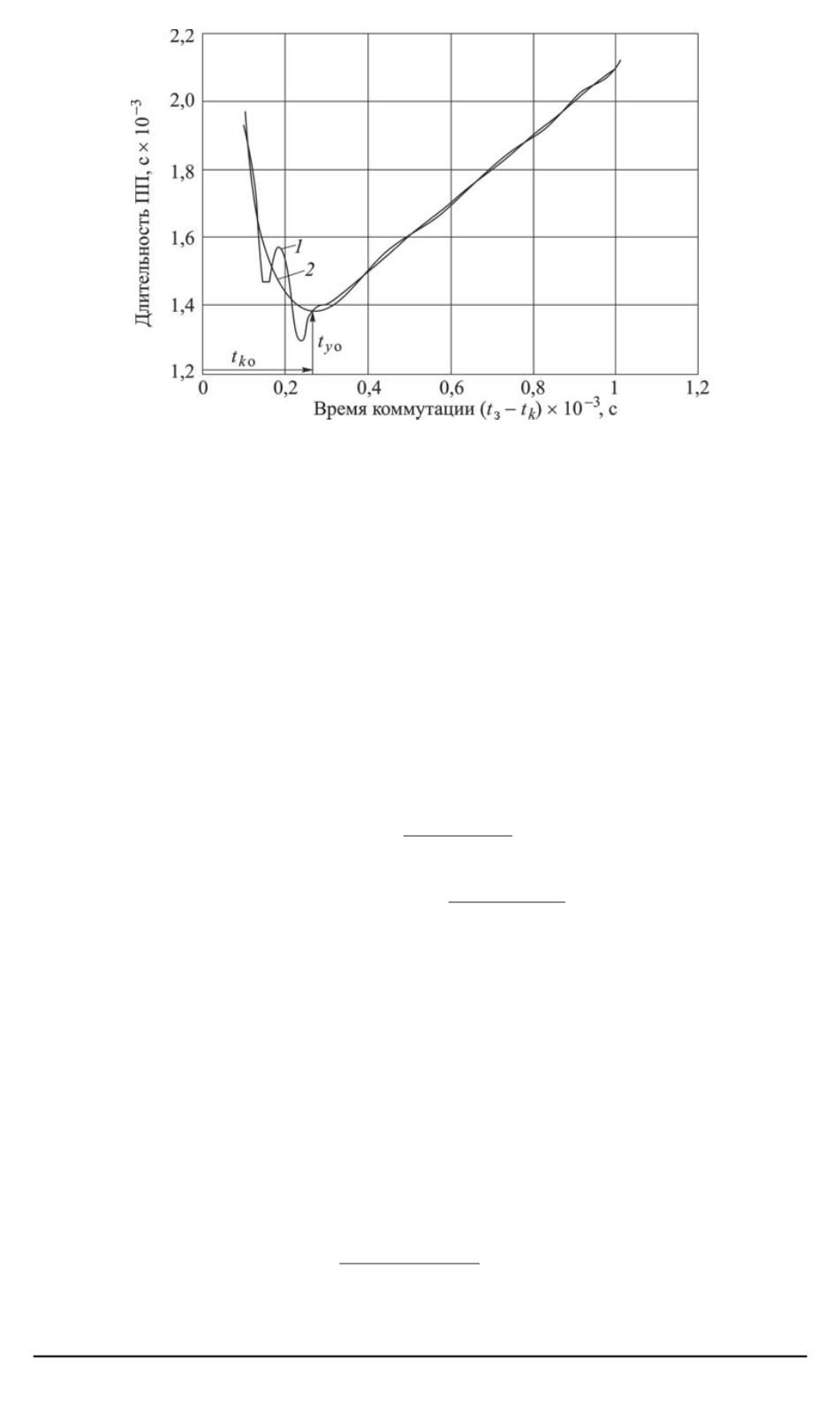
Рис. 6. Зависимость длительности ПП от времени коммутации
Таким образом, оптимальное время ПП
t
y
0
в системе ИФАПЧ с
коммутацией параметров можно определить из выражений (14) и (15),
в которых
t
k
o
=
t
k
−
t
З
.
Следует отметить, что выражения (14), (15) и (16) справедливы
для применения способов БЗ и ДЗН, когда
|
α
1м
|
>
|
α
2м
|
и нельзя
использовать для способа УРС, когда
|
α
1м
|
=
|
α
2м
|
.
Отметим, что при способе УРС
N
1
=
CSR
·
N
2
,
K
1
(0) =
K
1
(
t
k
)
×
×
CSR,
K
2
= 0
, где CSR — коэффициент, увеличивающий
N
2
и
K
1
в интервале времени
t
= 0
. . . t
k
. С использованием соотношения (2)
коэффициентCSR можно определить по формуле
CSR
=
ϕ
м
S
ГУН
U
м
N
2
ω
б
2
.
(17)
В выражении (17)
ϕ
M
=
|
Ф
ГУН
м
|
ω
б
2
S
ГУН
U
м
2
π
, где Ф
ГУН
м
— макси-
мальное отклонение координаты Ф
ГУН
(
t
)
от0 (при решении уравнения
(5)).
Для уменьшения времени ПП при осуществлении способа УРС
необходимо выбирать момент
t
k
таким образом, чтобы при
t > t
k
не
возникал вновь режим скольжения и помеха коммутации была ми-
нимизирована по отношению к уровню отклонения частоты ГУН от
номинала. Используя выражения (1) и (8), можно определить асим-
птотическое отклонение фазы ГУН в случае действительного макси-
мального
α
1м
:
Ф
у
(
t
)
2
π S
УГ
U
м
b
1
f
α
1
м
exp(
α
1
м
t
)
.
(18)
Будем считать, что
|
Ф
N
(
t
k
)
|
2
π
. Из этого соотношения и из
64 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2008. № 3


