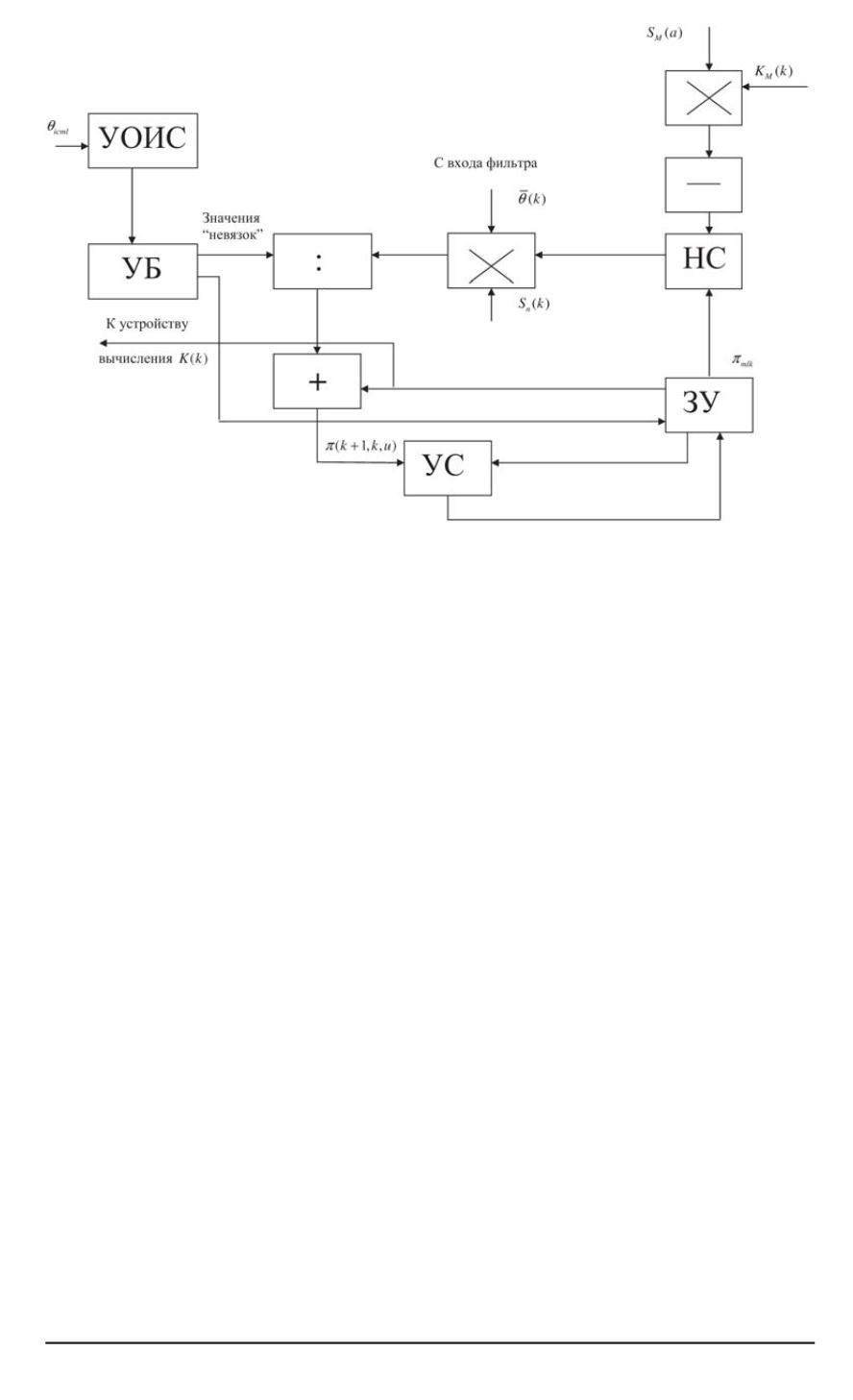
Рис. 2. Устройство коррекции значений элементов матрицы ОПВ
зом, из-за необходимости синхронизации работы системы фильтров и
существенного увеличения времени сходимости.
Гораздо более конструктивной выглядит реализация процедуры по-
шагового корректирования значений элементов матрицы ОПВ, по “не-
зашумленным” значениям невязки измерений. В этом случае выраже-
ния для определения значений элементов матрицы ОПВ на каждом
шаге процесса фильтрации могут быть представлены в виде:
Δ
π
ml
k
(
k
+ 1
, k, u
) =
−
(
Z
m
(
k
)
−
s
m
(
k
) ˙
θ
m
(
k
))
/s
m
(
k
)
×
×
K
1
[
π
ml
k
(
I
−
K
m
(
k
)
s
m
(
k
))]
k
−
1
˙
θ
m
(
k
);
(17)
π
ml
k
(
k
+ 1
, k, u
) =
π
ml
k
−
1
(
k
+ 1
, k, u
)
−
Δ
π
ml
k
(
k
+ 1
, k, u
)
.
(18)
Структурная схема устройства коррекции значений (УКЗ) элемен-
тов матрицы ОПВ для
m
-й ветви линейного фильтра [4], аппаратно
реализующего выражения (6)–(9), представлена на рис. 2 и состоит из
устройства сравнения (УС), устройства блокировки (УБ), устройства
прогнозирования значения индекса (УПЗИ) структуры, запоминаю-
щего устройства (ЗУ), накапливающего сумматора (НС), сумматора,
делителя, умножителей.
Структурная схема УПЗИ, аппаратно реализующая одну из форм
представления выражения (14) для модели (1)–(3), представлена на
рис. 3.
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2009. № 2 109


