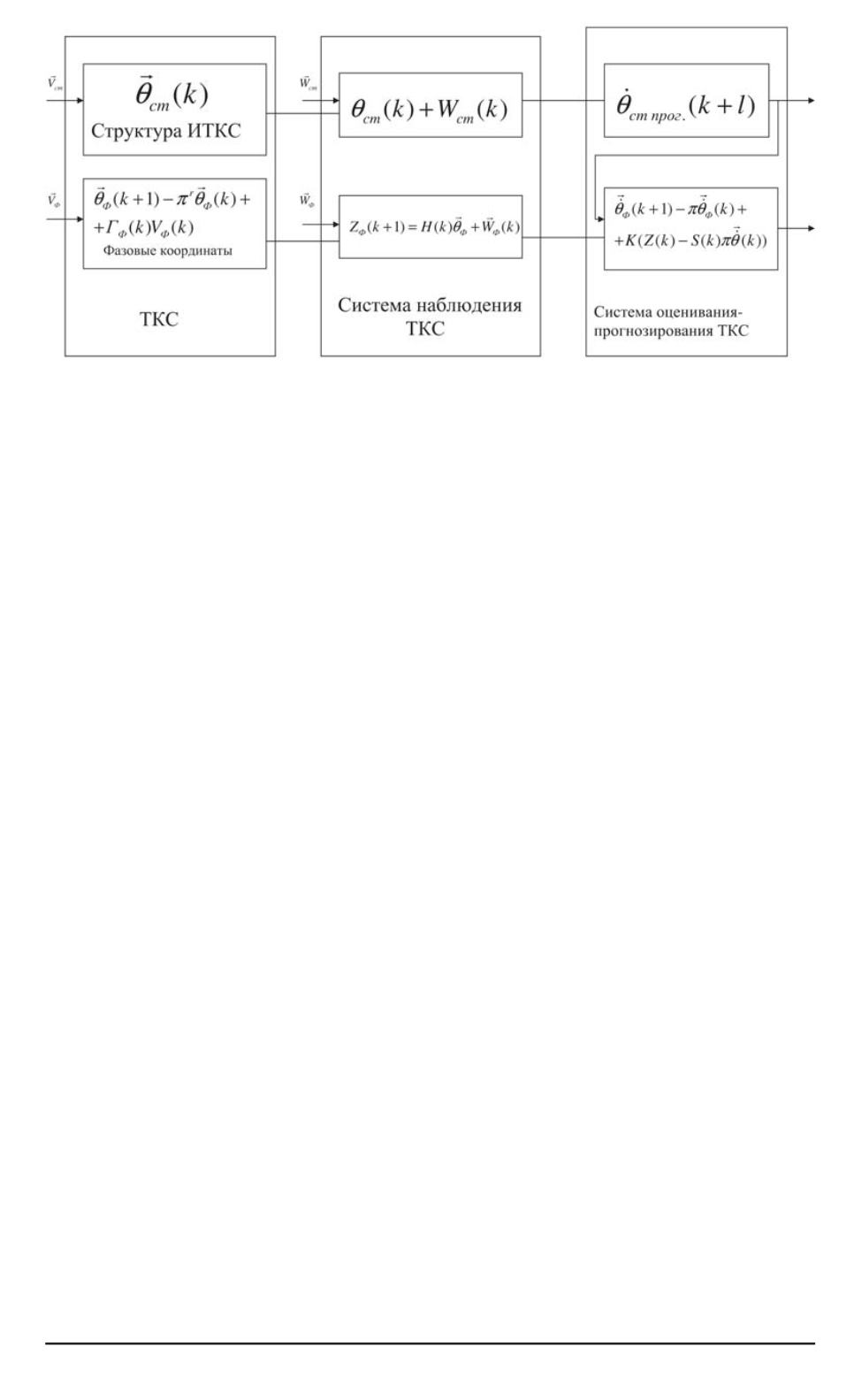
Рис. 1. Общая схема системы наблюдения–оценивания–прогнозирования значе-
нияТКС
Общее выражение для модели АРПСС временного ряда значений
i
-го элемента вектора индикаторов индекса структуры
θ
i
ст.
t
может быть
представлено в следующем виде:
φ
(
B
)Δ
d
θ
i
ст.
t
=
λ
(
B
)
V
t
+
φ
(
B
)Δ
d
W
ст.
t
,
(10)
где
φ
(
B
)
— оператор АР, определяемый в соответствии с выражением
φ
(
B
) = 1
−
φ
1
B
−
. . .
−
φ
p
B
p
;
(11)
B
— оператор сдвига назад (
Bθ
t
=
θ
t
−
1
);
Δ
— разностный оператор
со сдвигом назад (
Δ =
θ
ст.
t
−
θ
ст
. t
−
1
,
W
ст
.t
— значения шума наблюде-
ния за индексом структуры ИТКС);
V
t
— значение шума возбуждения
процесса
θ
ст
.t
;
λ
(
B
)
— оператор CC, определяемый в соответствии с
выражением
λ
(
B
) = 1
−
λ
1
B
−
. . .
−
λ
q
B
q
.
(12)
Частным случаем модели АР при
p
= 1
является марковский про-
цесс
θ
ст
.t
=
φ
(
t/t
−
1)
θ
ст
. t
−
1
+
V
t
.
(13)
При
p
= 0
смешанная модель преобразуется в модель
скользящего
среднего
, реализующую механизм учета динамики изменения значе-
ний возбуждающей последовательности
V
t
. В отличие от процесса АР
в процессе СС текущее наблюдение ряда представляет собой сумму
случайного компонента
V
t
в данный момент и линейной комбинации
взвешенных значений случайных воздействий в предыдущие
q
мо-
ментов времени. Определение оптимального значения параметров СС
основано на учете корреляций значений случайных воздействий на
глубину
q
шагов.
Очень часто для получения оценок коэффициентов АР и СС, а так-
же дисперсии шума возбуждения в модели АРПСС(
p, q
) используют
106 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2009. № 2


