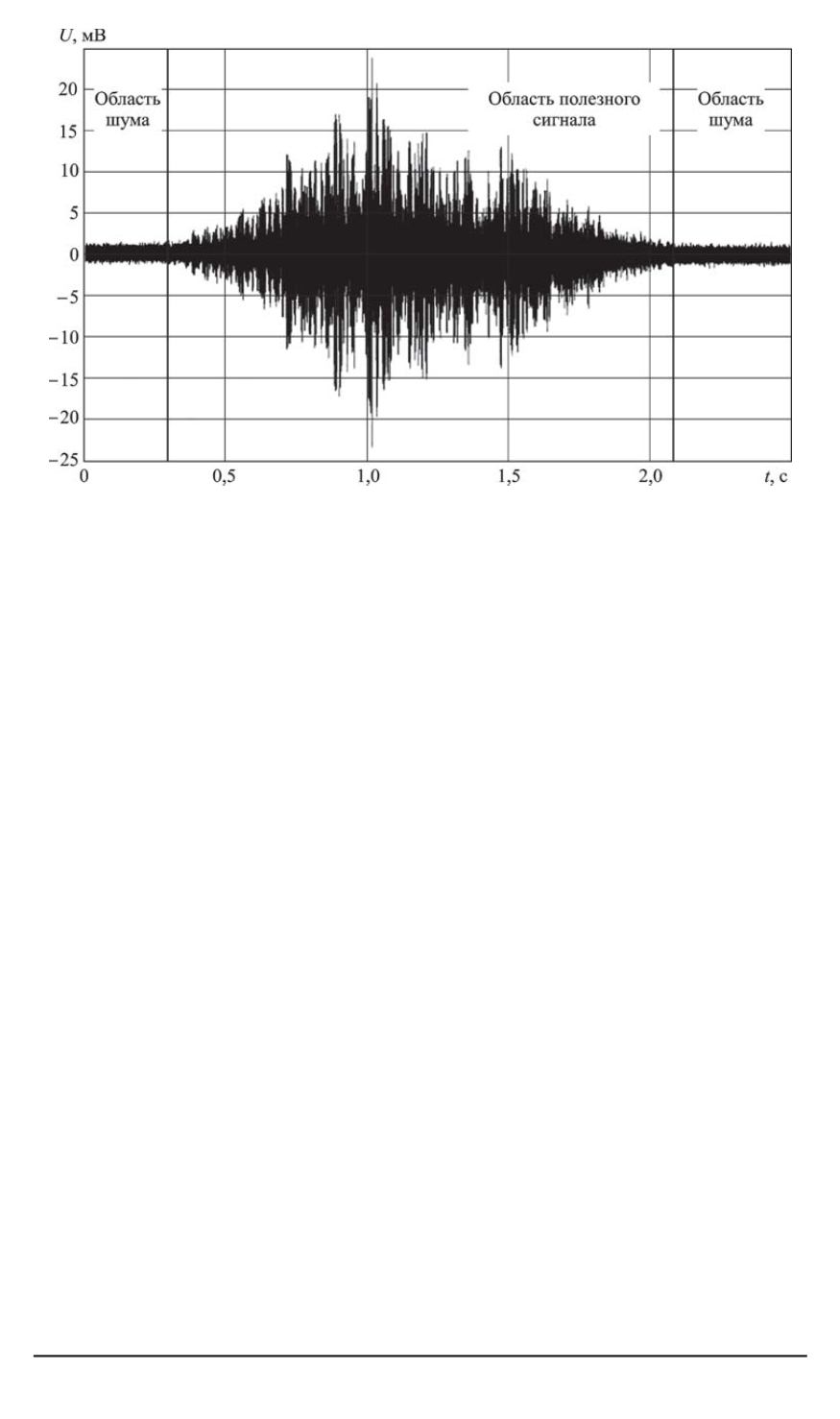
Рис. 1. Экспериментальная реализация сигнала доплеровской частоты при на-
личии цели
спектрально-поляризационных отличиях отраженных сигналов. Дан-
ная установка работает в
K
a
-диапазоне длин волн. Анализ реализаций
сигнала частоты Доплера позволил получить данные об отражающих
свойствах объектов нескольких классов при различных ракурсах на-
блюдения.
Цель настоящей работы — на основе этих данных построить ал-
горитм обнаружения подвижной автотранспортной техники на фоне
подстилающей поверхности.
Пример типичной реализации сигнала на выходе фильтра допле-
ровских частот, полученный при помощи установки, работающей в
K
a
-диапазоне длин волн, приведен на рис. 1. На рисунке можно выде-
лить область шума в начале и в конце реализации (сигнал помехи от
подстилающей поверхности) и область полезного сигнала (аддитивная
смесь сигнала и шума).
Анализ реализации показывает, что интенсивность полезного сиг-
нала быстро и хаотично изменяется, что объясняется сильной изре-
занностью диаграммы обратного рассеяния объекта при изменении
ракурса наблюдения. Поэтому в области полезного сигнала имеются
участки, где он сильно зашумлен. При этом отношение сигнал/шум
(ОСШ) может принимать значения, много меньшие единицы, что не-
обходимо учитывать в алгоритме принятия решения.
Для достижения поставленной в работе цели необходимо решить
следующие задачи:
— провести анализ экспериментальных данных;
— построить алгоритм принятия решения;
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2010. № 2 81


