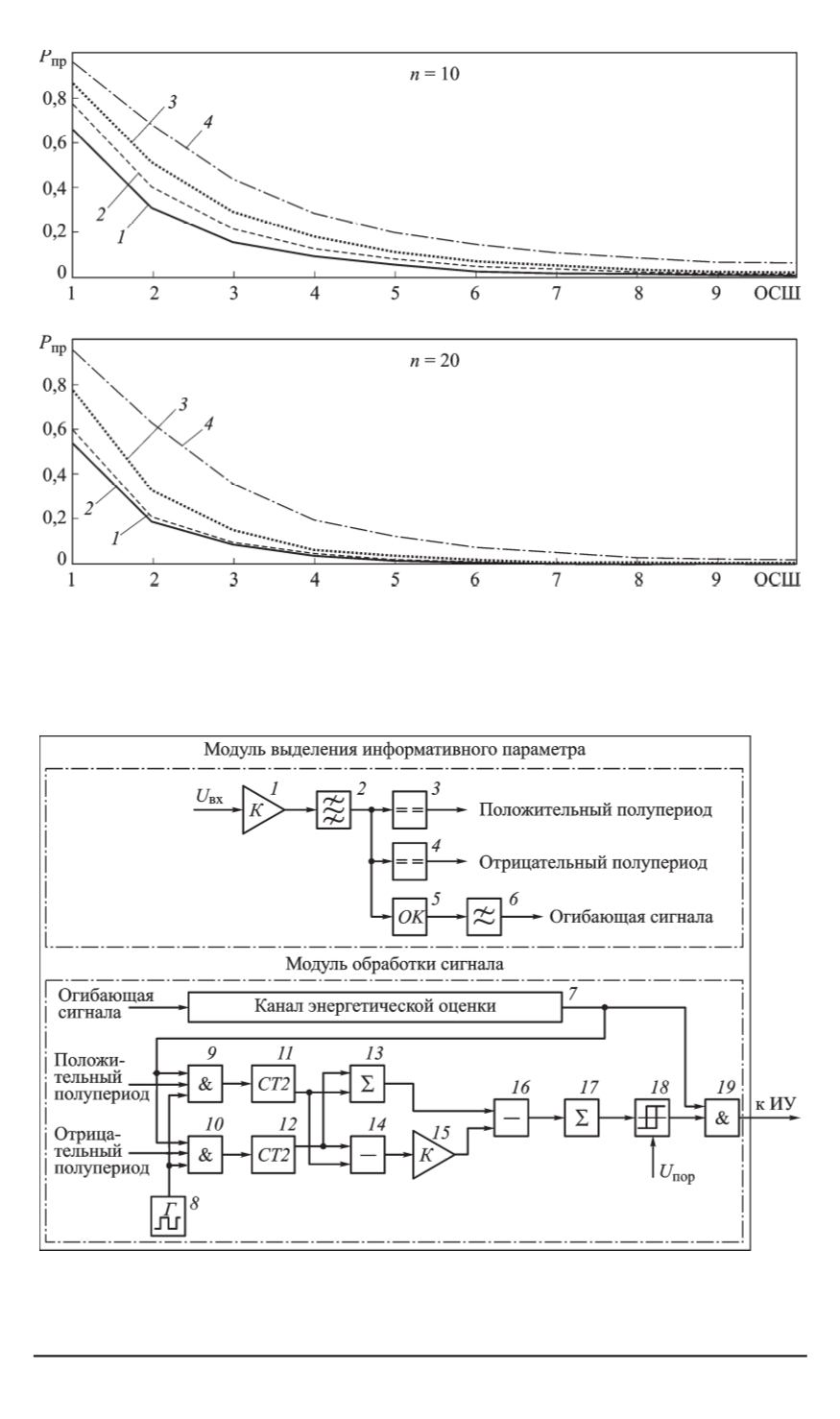
Рис. 6. Зависимость вероятности пропуска
P
пр
от ОСШ и параметра алгоритма
K
при обработке
n
= 10
и
n
= 20
интервалов между нулями входной реали-
зации:
K
= 0
,
1
(
1
); 1,0 (
2
); 2,0 (
3
) и 5,0 (
4
)
Рис. 7. Функциональная схема устройства принятия решения
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2010. № 2 89


