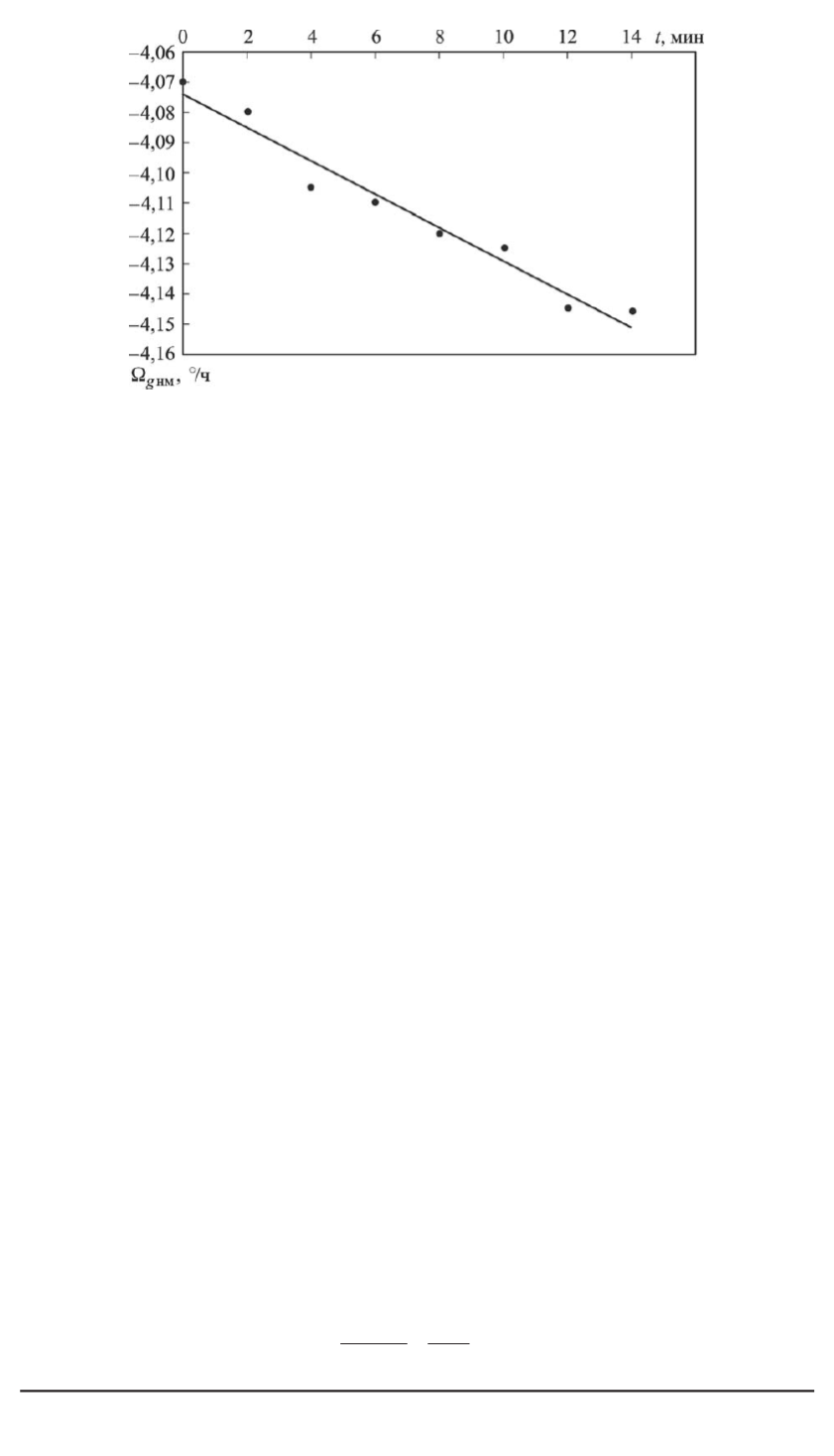
Рис. 4. Зависимость немагнитной составляющей дрейфа от времени:
точки — экспериментальные результаты; линия — линейная аппроксимирующая
функция
Прежде всего, отметим, что проблема дискрета выходного сигна-
ла не имеет принципиального ограничения, поскольку с переходом
на ЛГ большего размера дискрет уменьшается, увеличение времени
компасирования также уменьшает ошибку, кроме того, для ЛГ на ви-
броподвесе успешно эксплуатируется система домера фазы, когда не
нужно даже четверти периода биений встречных волн для формирова-
ния целого информационного импульса [4]. Это позволяет уменьшить
ошибку определения азимута из-за дискрета до
30
.
В ЛГ можно выделить следующие основные составляющие дрей-
фа, приводящие к шумовой составляющей немагнитной составляю-
щей дрейфа:
— изменение динамических зон захвата, связанное с изменением
амплитуды частотной подставки;
— ленгмюровский дрейф и катафорез [5], вызванные движением
газов в газоразрядных каналах иразностью токов в плечах резонатора;
— термоскольжение, связанное с наличием несимметричных гра-
диентов температуры по длине газоразрядных промежутков;
— нелинейное изменение (не ниже третьего порядка) от времени
магнитной составляющей дрейфа, приводящее к возникновению ка-
жущегося нелинейного изменения немагнитной составляющей дрей-
фа. Сюда же относятся все так называемые динамические дрейфы, т.е.
вызванные синхронными с коммутацией частотной подставки воздей-
ствиями [6].
Ошибка, связанная с неточностью определения широты места
Δ
γ
ϕ
от режима работы гироскопа не зависит и согласно данным работы [1]
определяется формулой:
Δ
γ
ϕ
≈
Δ
ϕ
cos
2
ϕ
Ω
ПЗ
Ω
З
−
sin
β .
(13)
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2012. № 3 119


