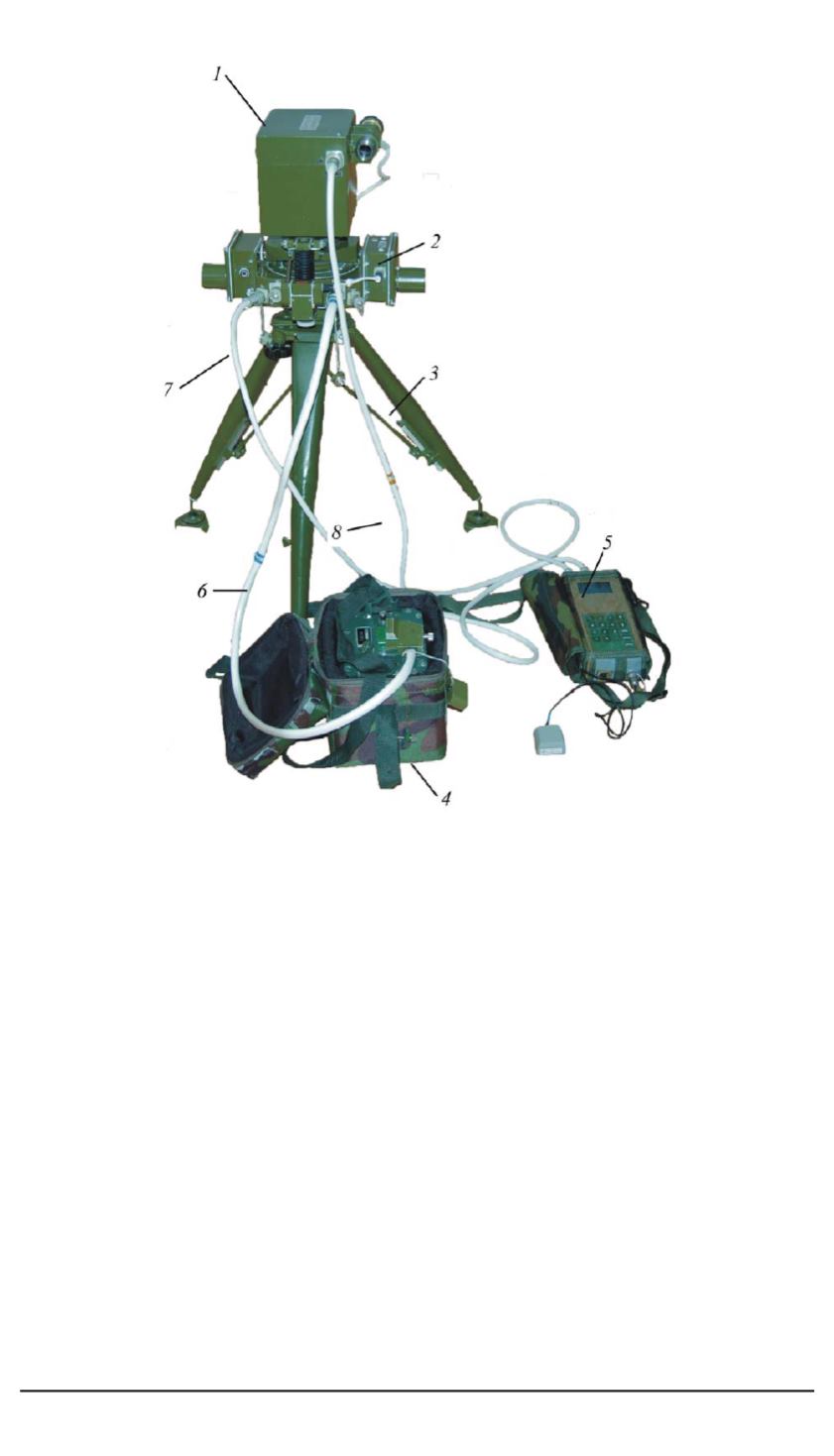
Рис. 5. Лазерный гирокомпас в развернутом положении:
1
— лазерный гирокомпас ЛГК-4;
2
— система наведения;
3
— тренога;
4
— батарея
питания;
5
— микроЭВМ;
6
— кабель питания;
7
— кабель связимежду микроЭВМ
и системой наведения;
8
— кабель связимежду микроЭВМ иЛГК-4
Устройство ЛГК-4.
Лазерный гирокомпас ЛГК-4 разработан
ФГУП НИИ “Полюс” для определения азимута целей при работе
лазерного дальномера-целеуказателя (ЛЦД). Внешний вид прибо-
ра вместе с лазерным дальномером-целеуказателем представлен на
рис. 5.
Лазерный гирокомпас представляет собой моноблок с пылевлаго-
непроницаемым кожухом (далее — БИ) с установленной на нем зри-
тельной трубой для наведения на цель, азимут направления на которую
нужно измерить.
ЛГК-4 включает в себя: ЛГ ДУП-4М и2 акселерометра АК5-50М;
модуль микроконтроллера Octagon 6040, который управляет процес-
самиизмерения ирасчета азимута, углов крена итангажа, иплату
питания и коммутации, предназначенную для формирования нужных
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2012. № 3 121


