














 6 / 19
6 / 19

Алгоритм навигации беспилотного летательного аппарата на основе улучшенного алгоритма…
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. Приборостроение. 2017. № 3
81
т
,
,
,
,
,
,
,
f
f
f
f
w k
w k w k w k
x y z
=
X
т
,
,
,
,
,
,
v
v
v
v
w k
w k w k w k
x y z
=
X
— координаты характерных
точек и центра масса БПЛА в связанной системе координат;
,
B
V
R
,
B
V k
L
— матри-
цы вращения и перемещения системы координат БПЛА на неподвижную си-
стему координат;
,
V
W
R
V
W
L
— матрицы преобразования и перемещения системы
координат камеры на систему координат БПЛА;
,
k
R
k
L
— матрицы вращения
и перемещения системы координат первого кадра изображения на систему ко-
ординат второго кадра изображения.
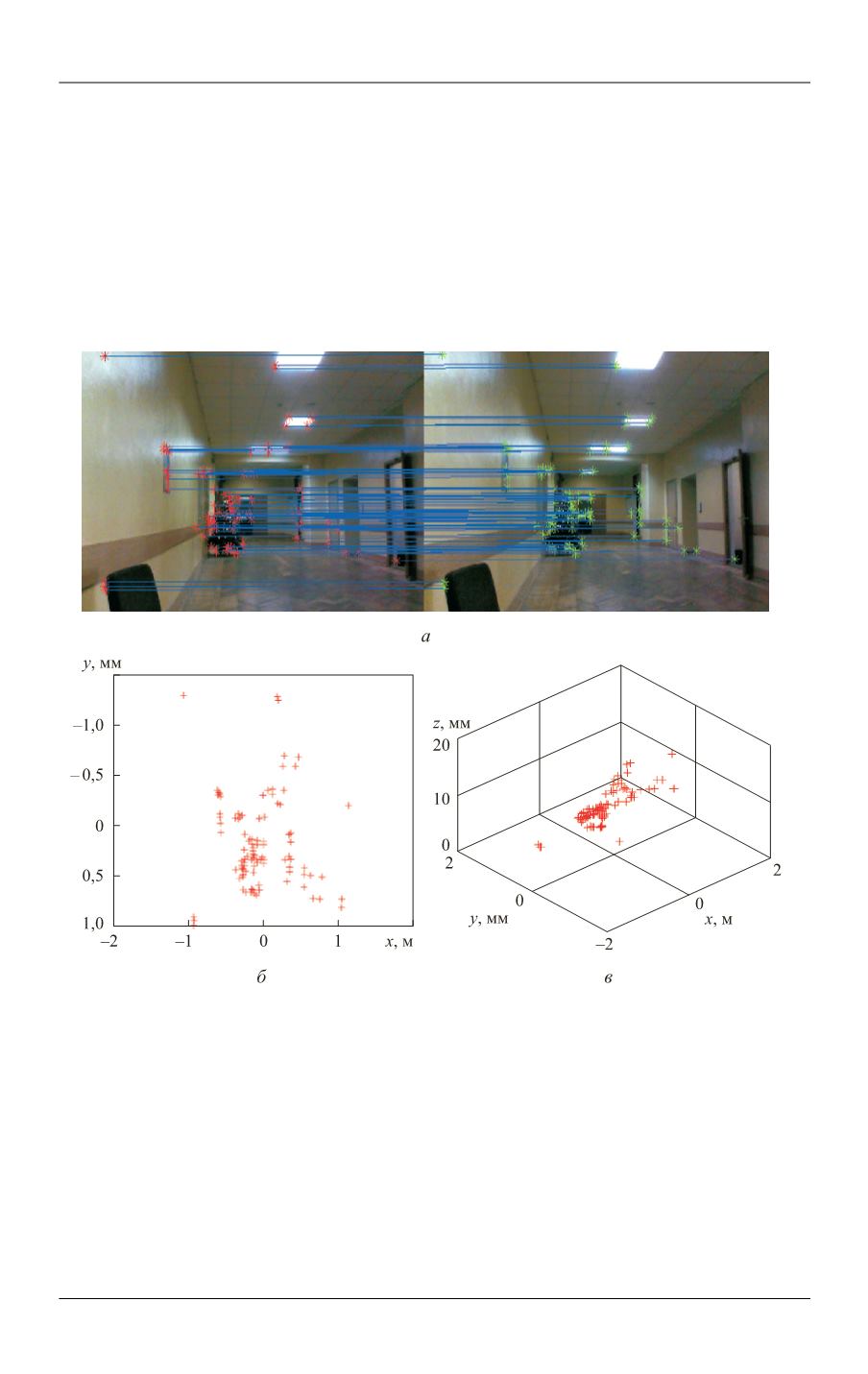
Рис. 2.
Реконструкция координат характерных точек:
а
— выделение и соответствие точек;
б
— двухмерные координаты точек;
в
— трехмерные коор-
динаты точек
В начальный момент система координат БПЛА совпадает с неподвижной си-
стемой координат. Примем, что движение бортовой камеры с достаточной точ-
ностью совпадает с движением БПЛА, т. е. матрицу
V
W
R
принимаем единичной, а
матрицу
V
W
L
— нулевой. Применение только визуального алгоритма компьютер-
ного зрения не позволяет точно получить масштабный коэффициент
ρ
(как пра-
вило, используют сочетание с инерциальным измерительным блоком), поэтому