














 12 / 19
12 / 19

Алгоритм навигации беспилотного летательного аппарата на основе улучшенного алгоритма…
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. Приборостроение. 2017. № 3
87
Множество изменений радиуса локальной карты
{
}
1 2 3
, ,
Q q q q
=
, где
1
q
—
увеличение радиуса;
2
q
— уменьшение радиуса;
3
q
— сохранение радиуса.
Множество дискретных событий, соответствующих множеству
Q
,
W
=
{
}
12 13 21 23 31 32
,
,
,
,
,
,
w w w w w w
=
где
mn
w
— переключение из
m
в
n
;
[
]
,
1, 2, 3 .
m n
∈
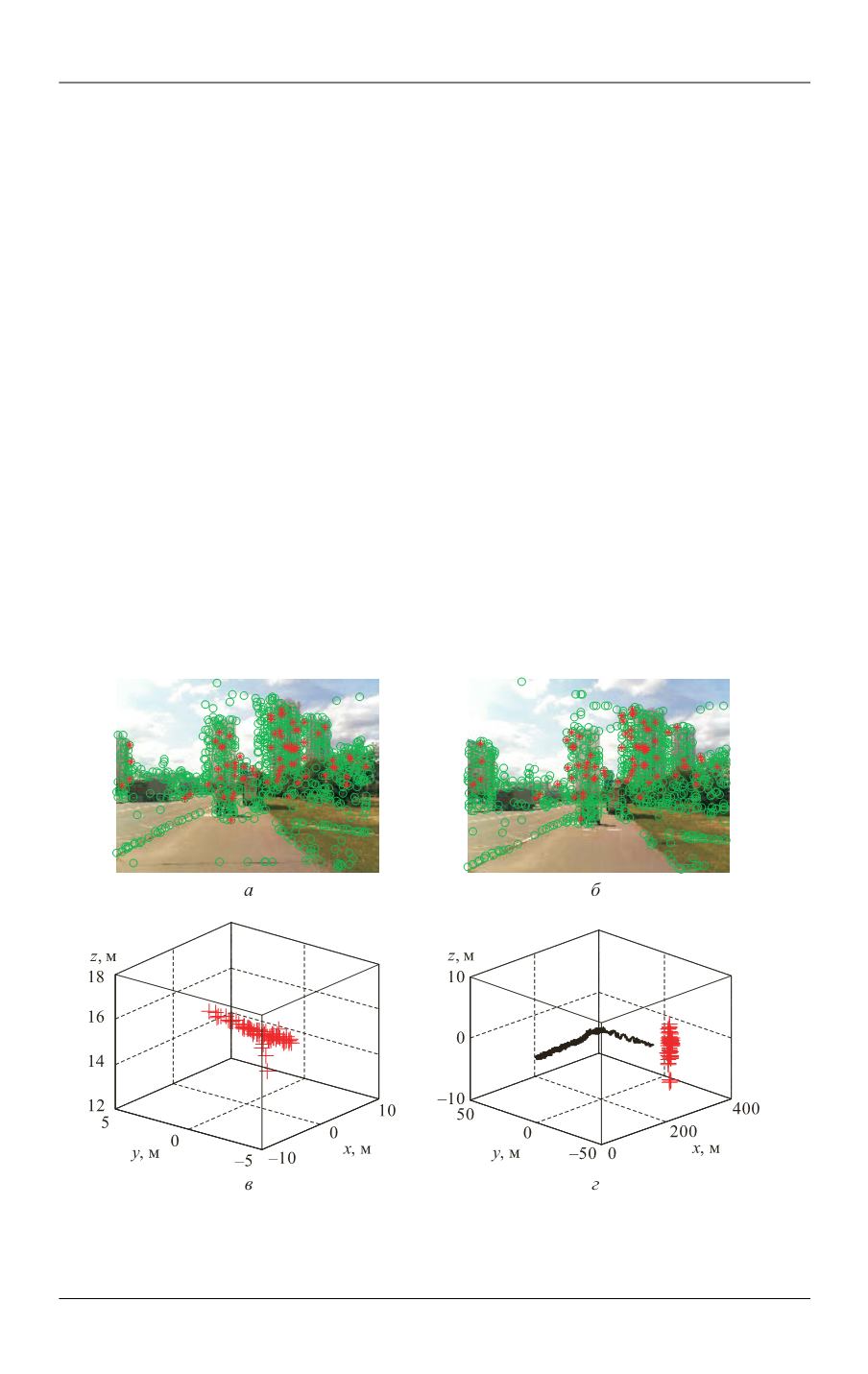
Моделирование и анализ результатов.
Для иллюстрации работоспособно-
сти предлагаемых улучшений проведен эксперимент на открытой местности
(в открытой среде). Экспериментальные результаты, определенные с помощью
чисто визуальной навигационной системы, сравнивались с показаниями спут-
никовой навигационной системы. В последовательность включены 1605 изоб-
ражений (кадров), полученных при движении на расстоянии около 820 м. Дви-
жение начинается из начала координат, начальный радиус локальной карты
25 м, скорость движения 0,3 м/с, минимальное число ориентиров для надежной
коррекции прогнозируемого вектора состояния
min
8,
n
=
максимальное число
ориентиров для устранения чрезмерной избыточности коррекции
max
50,
n
=
максимальный радиус надежного наблюдения
max
35
R
=
м, шаг одноразового
изменения радиуса локальной карты
0,1
R
Δ =
м. Характерные точки (зеленые) и
точки, использованные в качестве ориентиров на кадрах 583 и 584 (красные),
показаны на рис. 6,
а
,
б
, вычисленные координаты ориентиров из кадров 583 и
584 — на рис. 6,
в
, траектория движения камеры и координаты ориентиров в
неподвижной системе координат — на рис. 6,
г
.
Рис. 6.
Результаты эксперимента навигации по монокулярным данным 583 (
а
) и 584 (
б
)
кадров изображения, вычисленные координаты ориентиров из кадров 583 и 584 (
в
), траек-
тория движения камеры и координаты ориентиров в неподвижной системе координат (
г
)