














 14 / 19
14 / 19

Алгоритм навигации беспилотного летательного аппарата на основе улучшенного алгоритма…
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. Приборостроение. 2017. № 3
89
дения эта ошибка мала и соизмерима с ошибкой традиционного алгоритма
EKF–SLAM с большим диапазоном наблюдения, хотя и обеспечивается при го-
раздо меньшем времени вычислений.
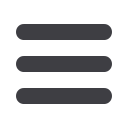
Для проверки точности предложенного метода проведено сравнение траек-
тории, рассчитанной по данным монокулярной съемки, с информацией спутни-
ковой (GPS) навигации. Результаты показаны на рис. 9 и рис. 10.
Рис. 9.
Результаты эксперимента навигации по монокулярным данным 1604 (
а
) и 1605 (
б
)
кадров изображения, вычисленные координаты ориентиров из кадров 1604 и 1605 (
в
), тра-
ектория движения камеры и координаты ориентиров в неподвижной системе координат (
г
)
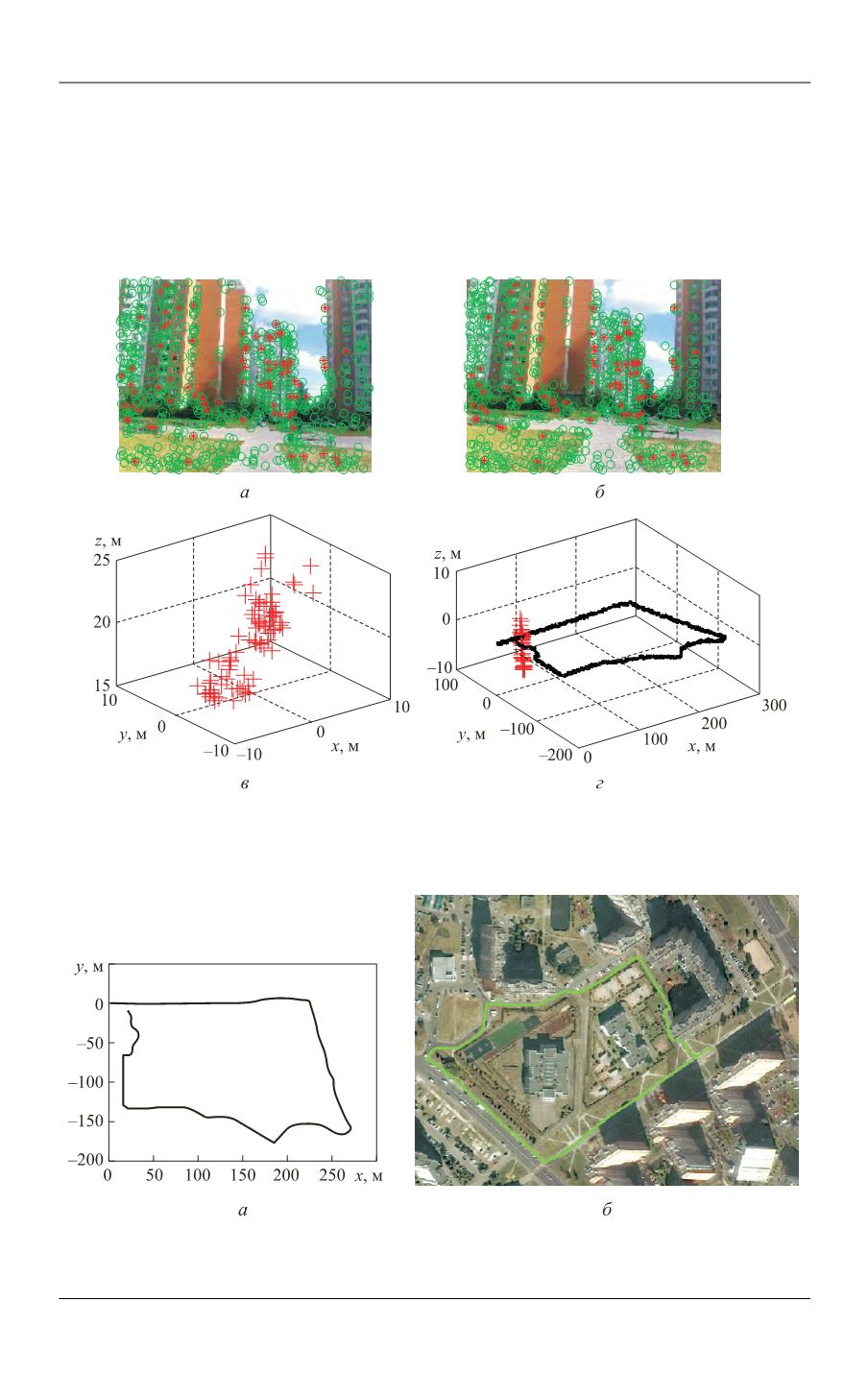
Рис. 10.
Вычисленная траектория движения на плоскости
Oxy
(
а
) и истинная
траектория движения (
б
) на спутниковой карте