














 11 / 19
11 / 19

Кэ Кэ Гэн, Н.А. Чулин
86
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. Приборостроение. 2017. № 3
Если не изменять радиус локальной кар-
ты, то возможны следующие проблемы:
1) в среде с редкими ориентирами число
наблюдаемых ориентиров в области
1
S
может
оказаться слишком малым, даже равным нулю,
вследствие чего невозможно уточнение пози-
ционирования, т. е. ошибка предсказания бу-
дет продолжать накапливаться;
2) в среде с множественными ориентира-
ми число ориентиров в области
S
может ока-
заться слишком большим, многие из этих ори-
ентиров будут избыточными для позициони-
рования робота, что приведет к увеличению
размерности вектора состояния и повлияет на
скорость вычислений;
3) если диапазон наблюдения является
слишком большим, то достоверность наблюдения отдаленных ориентиров сни-
жается, что влияет на точность позиционирования робота.
Для решения этих проблем используем алгоритм EKF–SLAM с адаптацией об-
ласти наблюдения в зависимости от состояния потока поступающих ориентиров.
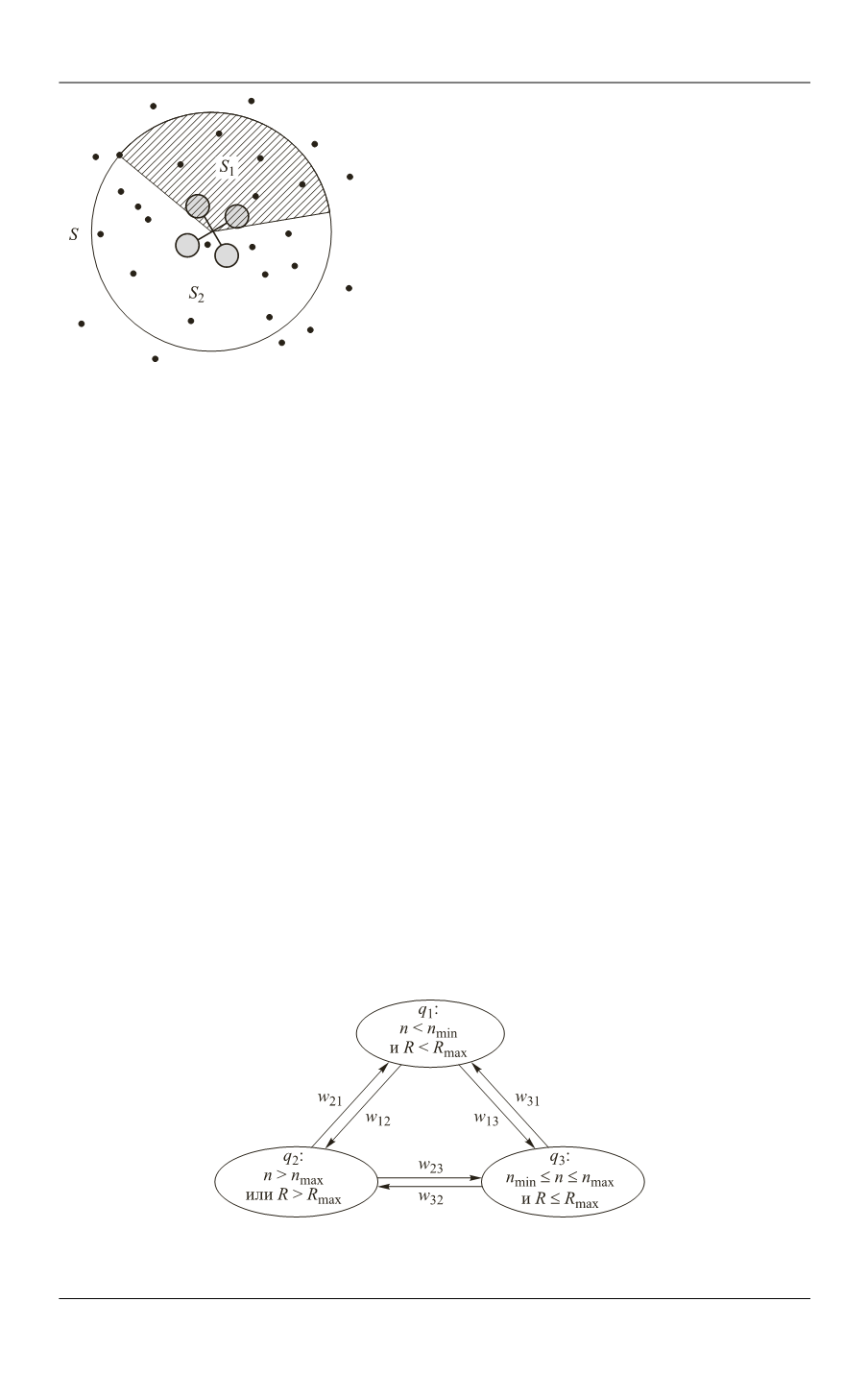
Если число ориентиров
n
в наблюдаемой области
1
S
меньше, чем минимально
необходимое для надежной коррекции прогнозируемого вектора состояния число
ориентиров
min
n
(
min
n n
<
), и радиус наблюдения
R
меньше максимального ра-
диуса
max
R
надежного наблюдения (
max
R R
<
), то предлагается увеличить радиус
локальной карты. Если число ориентиров больше максимального числа ориенти-
ров
max
,
n
позволяющее избегать чрезмерной избыточности коррекции (
max
n n
>
),
или радиус наблюдения больше максимального радиуса надежного наблюдения
max
(
),
R R
>
то предлагается уменьшать радиус локальной карты. Когда число ори-
ентиров
min
max
n n n
≤ ≤
и
max
,
R R
<
радиус локальной карты остается неизмен-
ным. Соответствующая диаграмма изменения радиуса локальной карты показана
на рис. 5.
Рис. 5.
Диаграмма изменения радиуса локальной карты
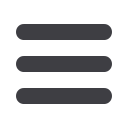
Рис. 4.
Круговая локальная карта
и диапазон наблюдения:
S
— круговая локальная карта;
1
S
—
диапазон наблюдения;
2
S
— дополни-
тельный диапазон; • — ориентиры