














 13 / 19
13 / 19

Кэ Кэ Гэн, Н.А. Чулин
88
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. Приборостроение. 2017. № 3
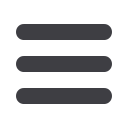
Для проверки работоспособности предложенного алгоритма проведено
сравнение времени вычислений для обработки каждого кадра изображения с
постоянным диапазоном наблюдения 25 м и с адаптивным диапазоном.
Результаты, представленные на рис. 7, показывают, что время вычисления
алгоритмом с постоянным диапазоном 25 м увеличивается с ростом числа кад-
ров изображений, а время вычисления алгоритмом с адаптивным диапазоном
наблюдения остается в небольшом приемлемом диапазоне.
Рис. 7.
Изменение времени вычисления алгоритма SLAM при постоянном радиусе
наблюдения 25 м (
а
) и при адаптивном радиусе наблюдения (
б
)
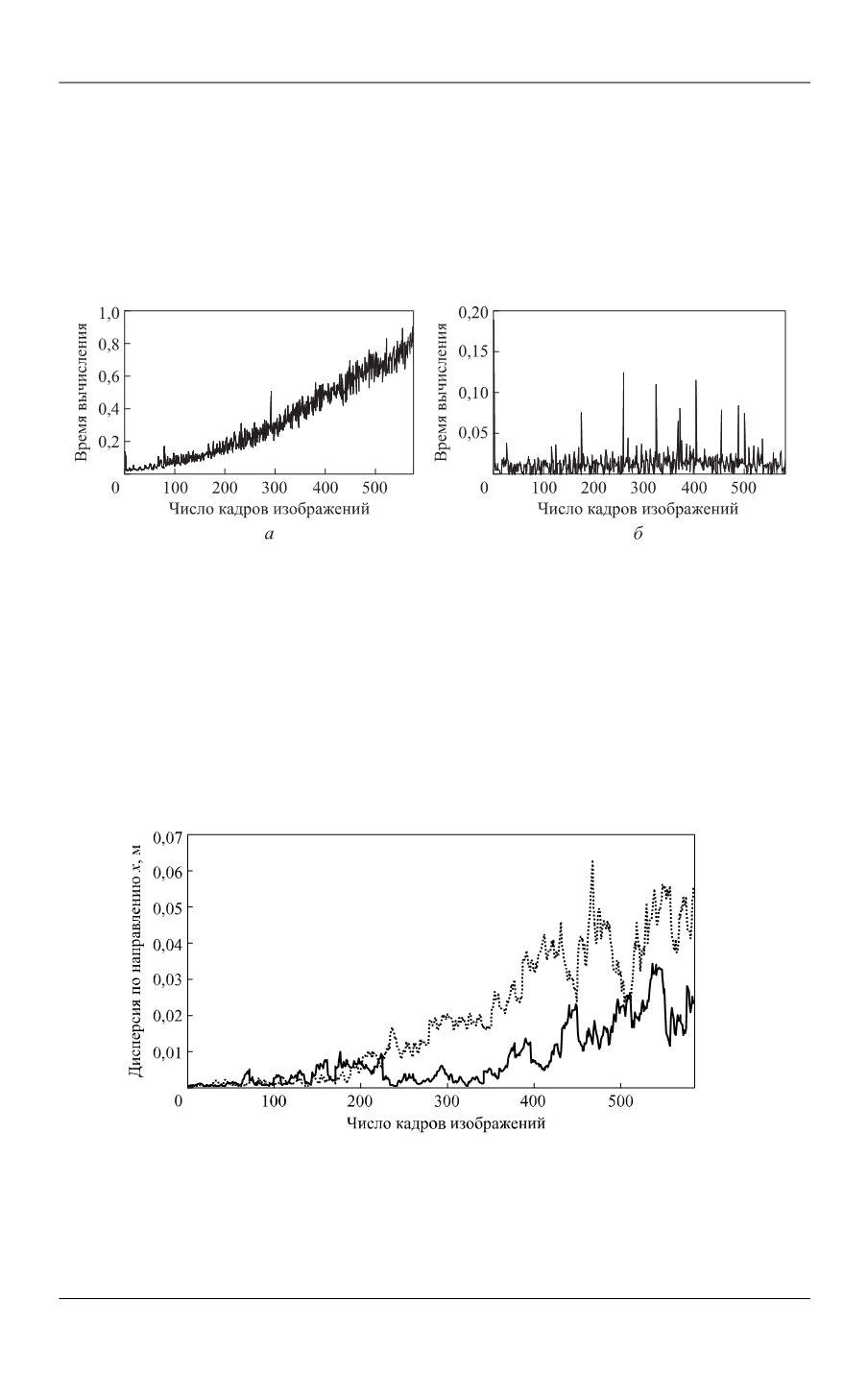
Для сравнения точности позиционирования традиционным и предлагае-
мым алгоритмами на рис. 8 приведены изменения дисперсии ошибок определе-
ния положения БПЛА, т. е. дисперсии позиционирования БПЛА по координа-
там
х
в момент
k
:
(
)
2
,
ˆ ,
x k
k k
SE x x
= −
где
,
k
x
ˆ
k
x
—
реальные и спрогнозированные координаты БПЛА.
Рис. 8.
Дисперсия позиционирования по координате
x
Ошибка между реальным и спрогнозированным положением БПЛА алго-
ритма EKF–SLAM с постоянным диапазоном наблюдения достигает значитель-
ных величин, а для предлагаемого алгоритма с адаптивным диапазоном наблю-