














 3 / 19
3 / 19

Кэ Кэ Гэн, Н.А. Чулин
78
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. Приборостроение. 2017. № 3
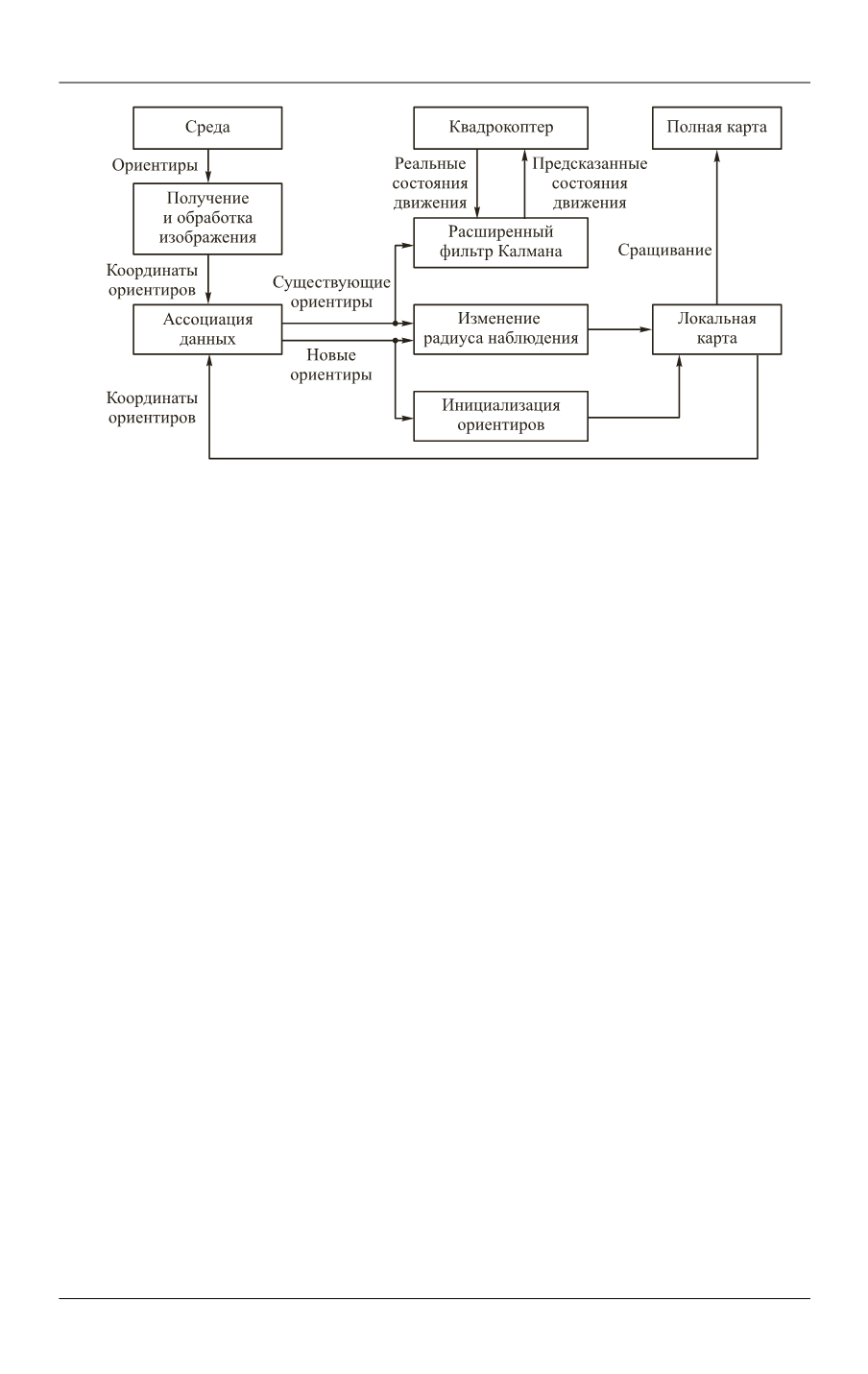
Рис. 1.
Структура усовершенствованного алгоритма AR-EKF–SLAM
Представляемые результаты изложены в настоящей статье в следующем
порядке: суть проблемы с кратким обзором подходов к ее решению и основным
содержанием данной статьи в краткой форме; разработка алгоритма получения
и расчета координат точек ориентиров среды; разработка расширенного филь-
тра Калмана (EKF) в алгоритме SLAM; ассоциация данных для алгоритма SLAM;
разработка алгоритма EKF–SLAM с адаптацией диапазона наблюдений; анализ
результатов эксперимента визуальной навигации во внешней среде.
Получение и расчет координат точек ориентиров среды.
В настоящее
время существует много алгоритмов обнаружения характерных (особых, в част-
ности, угловых) точек изображений, например, алгоритм Harris’а, алгоритм
FAST, алгоритм FASTER, алгоритм Moravec’а, алгоритм SUSAN и др., аналити-
ческий обзор которых приведен в работе [12]. Здесь выбран алгоритм SUSAN,
предложенный С. Смитом и Дж. Бреди (S.M. Smith, J.M. Brady, 1997) [13],
который является более быстрым и устойчивым в случае размытия и неравно-
мерной яркости фона изображений [14]. Для описания корреляции между угло-
выми точками двух изображений использована функция нормированной
взаимной корреляции NCC (Normalized Cross Correlation) [15]. После грубого
установления соответствия остается возможность существования неправиль-
ных пар соответственных характерных точек. В этой работе применен алгоритм
RANSAC для получения точного соответствия характерных точек и фундамен-
тальной матрицы
F
, связывающей координаты одинаковых точек на двух по-
следовательных изображениях, удовлетворяющей уравнению [16]:
( )
т
0,
x
x
′ ⋅ ⋅ =
F
где
т
[ , ,1] ,
x u v
=
т
[ , ,1]
x u v
′
′ ′
=
— пиксельные координаты характерных точек на
двух изображениях.
Координаты характерных точек могут быть получены с помощью уравне-
ний: